

授权公布号:CN110531757B
基于履带式擦窗机器人的路径规划方法以及设备
有效
申请
2019-07-30
申请公布
2019-12-03
授权
2022-05-13
预估到期
2039-07-30
| 申请号 | CN201910697749.9 |
| 申请日 | 2019-07-30 |
| 申请公布号 | CN110531757A |
| 申请公布日 | 2019-12-03 |
| 授权公布号 | CN110531757B |
| 授权公告日 | 2022-05-13 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 广州晒帝智能科技有限公司 |
| 申请人地址 | 广东省广州市天河区大灵山路18号裕景工业园9栋18楼 |
专利法律状态
2022-05-13
授权
状态信息
授权
2019-12-03
公布
状态信息
公布
摘要
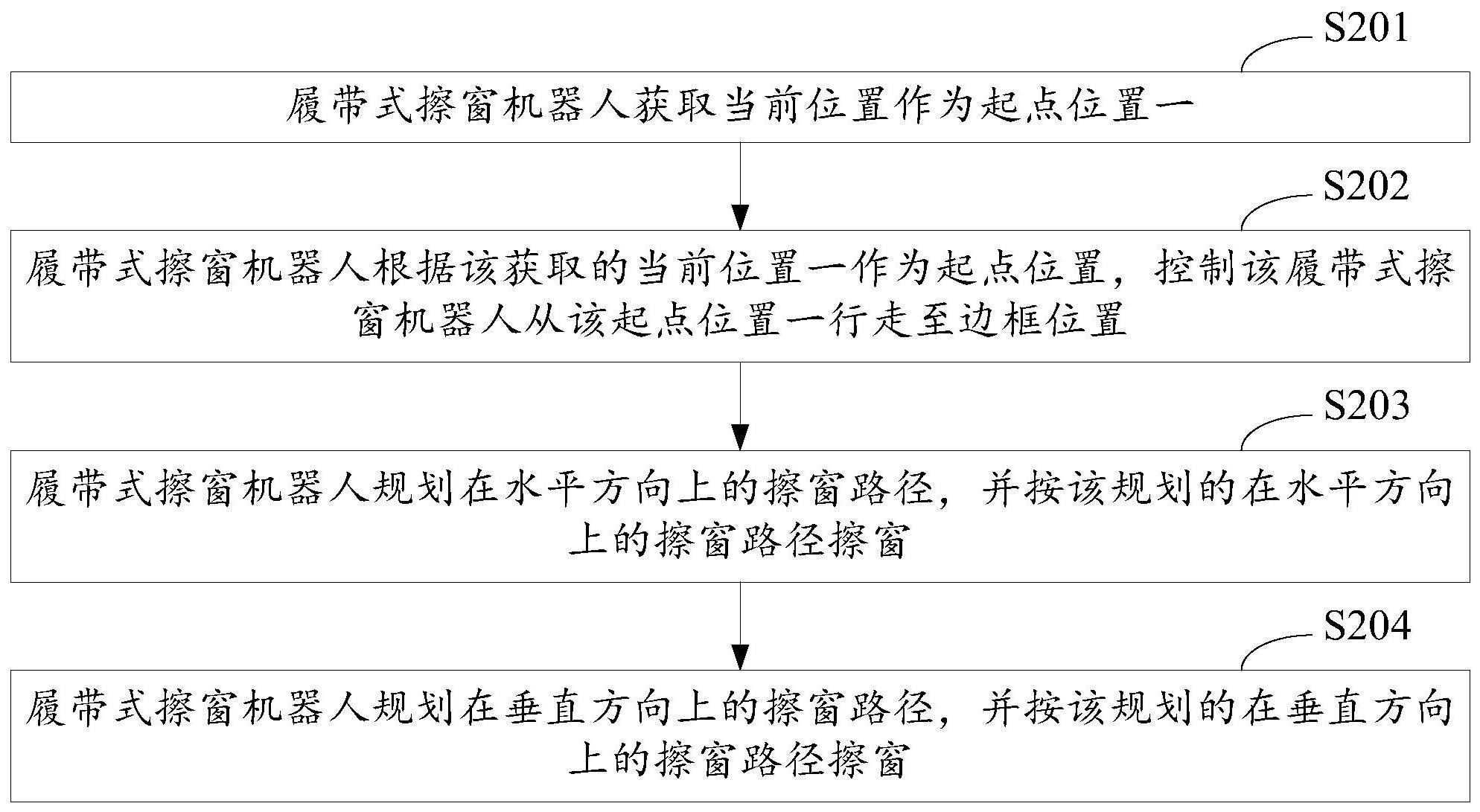
本发明公开了一种基于履带式擦窗机器人的路径规划方法以及设备。其中,所述方法包括:履带式擦窗机器人获取当前位置作为起点位置一,和根据该获取的当前位置作为起点位置一,控制从该起点位置一行走至边框位置,和规划在水平方向上的擦窗路径,并按该规划的在水平方向上的擦窗路径擦窗,以及规划在垂直方向上的擦窗路径,并按该规划的在垂直方向上的擦窗路径擦窗。通过上述方式,能够实现履带式擦窗机器人能够全覆盖路径擦窗,能够使规划路径最简化,避免出现重复擦相同地方,提高了擦窗效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有