

授权公布号:CN220548302U
一种自动更换机床卡爪的机器人抓手
有效
申请
2023-06-07
申请公布
1970-01-01
授权
2024-03-01
预估到期
2033-06-07
| 申请号 | CN202321441177.6 |
| 申请日 | 2023-06-07 |
| 授权公布号 | CN220548302U |
| 授权公告日 | 2024-03-01 |
| 分类号 | B25J15/08 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 天津汽车模具股份有限公司 |
| 申请人地址 | 天津市滨海新区自贸试验区(空港经济区)航天路77号 |
专利法律状态
2024-03-01
授权
状态信息
授权
摘要
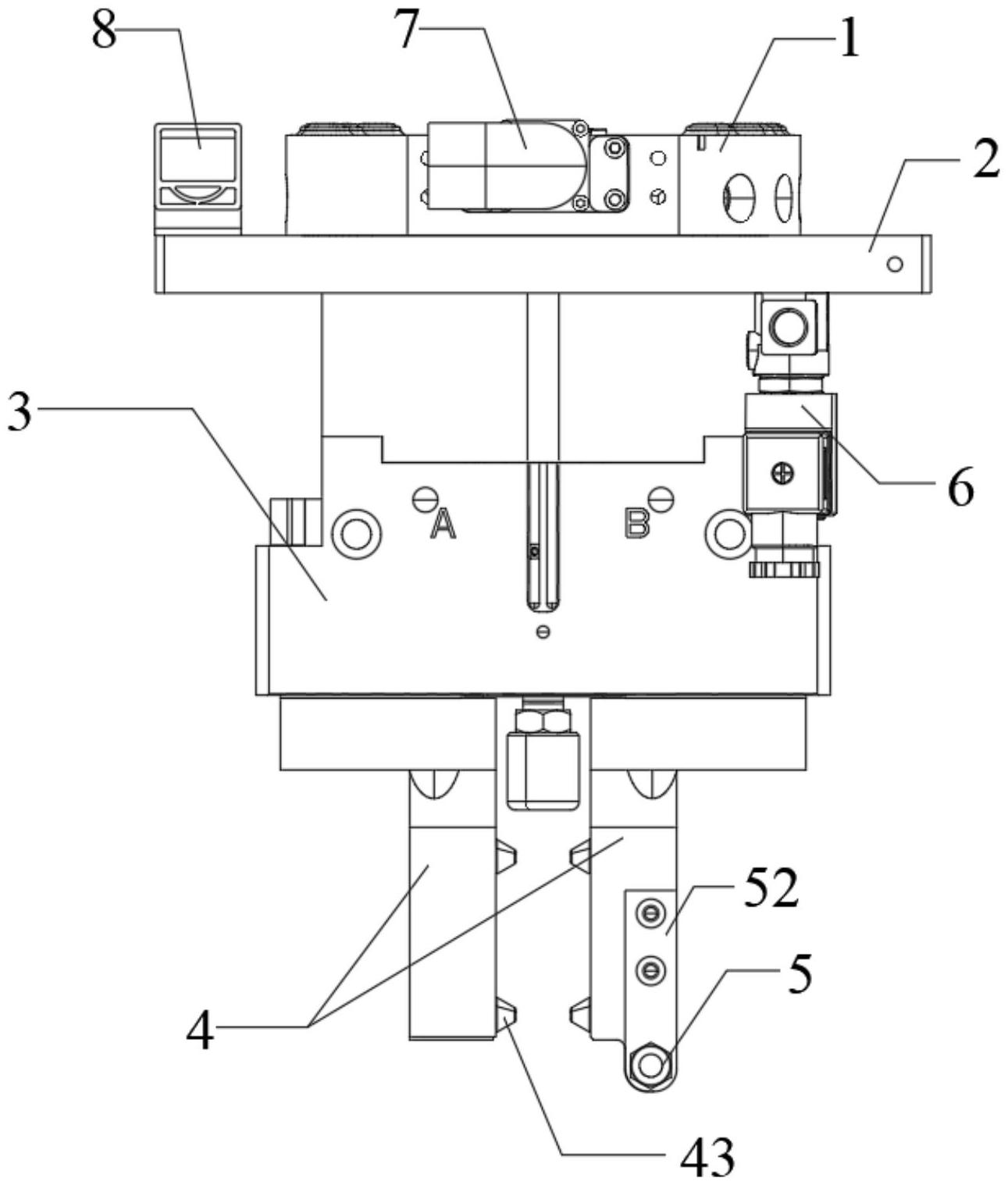
本实用新型公开了一种自动更换机床卡爪的机器人抓手,包括连接板、工具侧快换盘、夹持机构和解锁机构,工具侧快换盘上设有与机器人侧快换盘连接的安装结构,夹持机构包括固定于连接板上的夹持气缸和由夹持气缸驱动的夹紧手指对,夹紧手指对对称并向竖直夹持中心面夹持,解锁机构位于夹持机构正后方,包括解锁撞块及解锁气缸,解锁撞块位于竖直夹持中心面上,其下端面为撞击面,位于卡爪锁紧按钮正上方;该机器人抓手通过夹持机构夹持卡爪,夹持机构后方的解锁机构自动推压锁紧按钮释放卡爪,其集成了夹持机构和解锁机构,使得自动解锁过程中卡爪始终保持被夹持状态,拆卸可靠且效率高,利于简化机器人动作,提高生产效率和生产安全性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有