

授权公布号:CN111257903B
车辆定位方法、装置、计算机设备和存储介质
有效
申请
2020-01-09
申请公布
2020-06-09
授权
2022-08-09
预估到期
2040-01-09
| 申请号 | CN202010021278.2 |
| 申请日 | 2020-01-09 |
| 申请公布号 | CN111257903A |
| 申请公布日 | 2020-06-09 |
| 授权公布号 | CN111257903B |
| 授权公告日 | 2022-08-09 |
| 分类号 | G01S17/42;G01S7/48;G01S17/931 |
| 分类 | 测量;测试; |
| 申请人名称 | 广州微牌智能科技有限公司 |
| 申请人地址 | 浙江省宁波市余姚市中意宁波生态园兴业路48号6号楼2层 |
专利法律状态
2022-09-09
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):G01S 17/42;专利号:ZL2020100212782;登记生效日:20220830;变更事项:专利权人;变更前权利人:广州微牌智能科技有限公司;变更后权利人:微牌科技(浙江)有限公司;变更事项:地址;变更前权利人:510665 广东省广州市天河区天河东路242号507房、508房;变更后权利人:315000 浙江省宁波市余姚市中意宁波生态园兴业路48号6号楼2层
2022-08-09
授权
状态信息
授权
2020-07-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01S 17/42;专利申请号:2020100212782;申请日:20200109
2020-06-09
公布
状态信息
公布
摘要
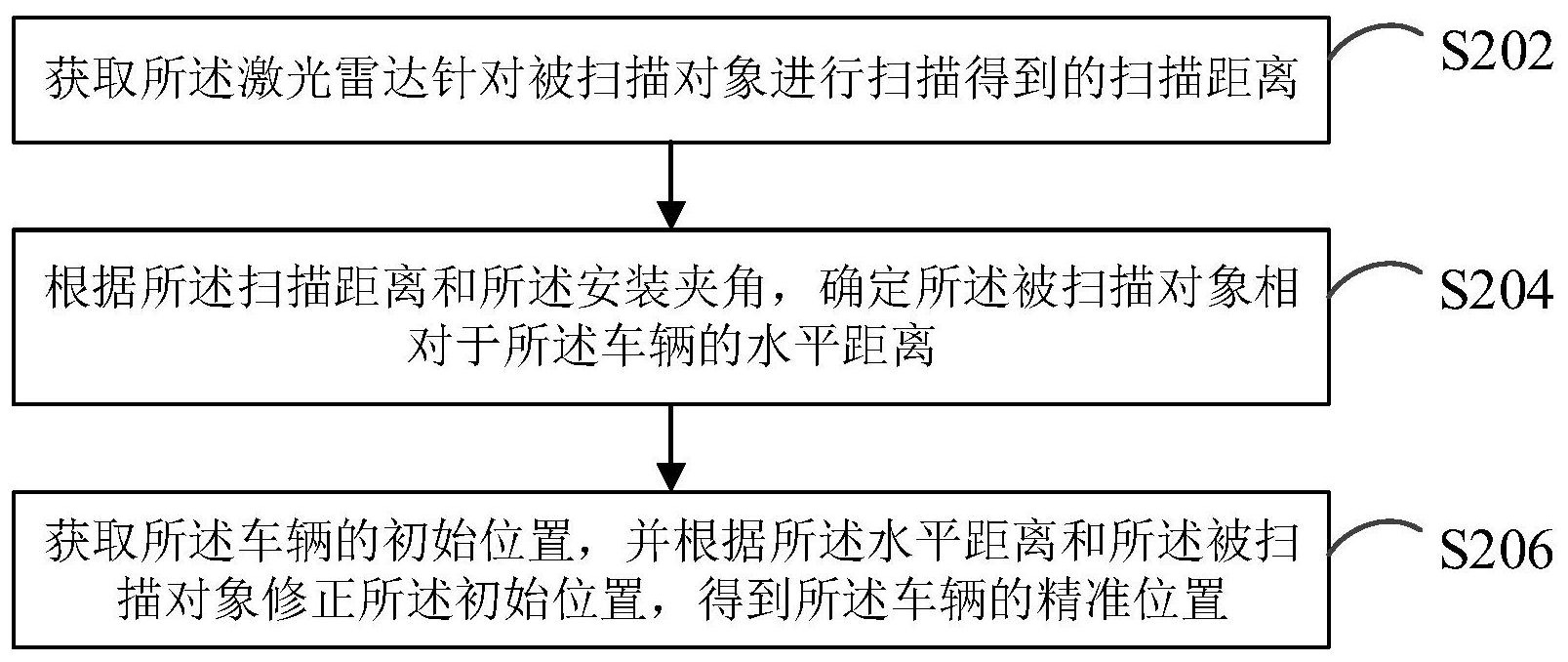
本申请涉及一种车辆定位方法、装置、计算机设备和存储介质。所述车辆上安装有激光雷达,所述激光雷达的扫描线与所述车辆所处的地平面形成夹角;当所述扫描线与所述车辆的侧平面平行时,将所述夹角记为安装夹角,所述方法包括:获取所述激光雷达针对被扫描对象进行扫描得到的扫描距离和扫描角度;根据所述扫描距离、所述扫描角度和所述安装夹角,确定所述被扫描对象相对于所述车辆的水平距离和水平扫描角度;获取所述车辆的初始位置,并根据所述水平距离、所述水平扫描角度和所述被扫描对象修正所述初始位置,得到所述车辆的精准位置,采用本方法能够实现在经过地标高度不同的场景下时,仍可实现对车辆的精确定位。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有