

授权公布号:CN113160298B
一种深度真值获取方法、装置、系统及深度相机
有效
申请
2021-03-31
申请公布
2021-07-23
授权
2024-03-08
预估到期
2041-03-31
| 申请号 | CN202110347156.7 |
| 申请日 | 2021-03-31 |
| 申请公布号 | CN113160298A |
| 申请公布日 | 2021-07-23 |
| 授权公布号 | CN113160298B |
| 授权公告日 | 2024-03-08 |
| 分类号 | G06T7/593;G06T7/514;G06T7/80 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 奥比中光科技集团股份有限公司 |
| 申请人地址 | 广东省深圳市南山区粤海街道学府路63号高新区联合总部大厦11-13楼 |
专利法律状态
2024-03-08
授权
状态信息
授权
2021-08-10
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/593;申请日:20210331
2021-07-23
公布
状态信息
公布
摘要
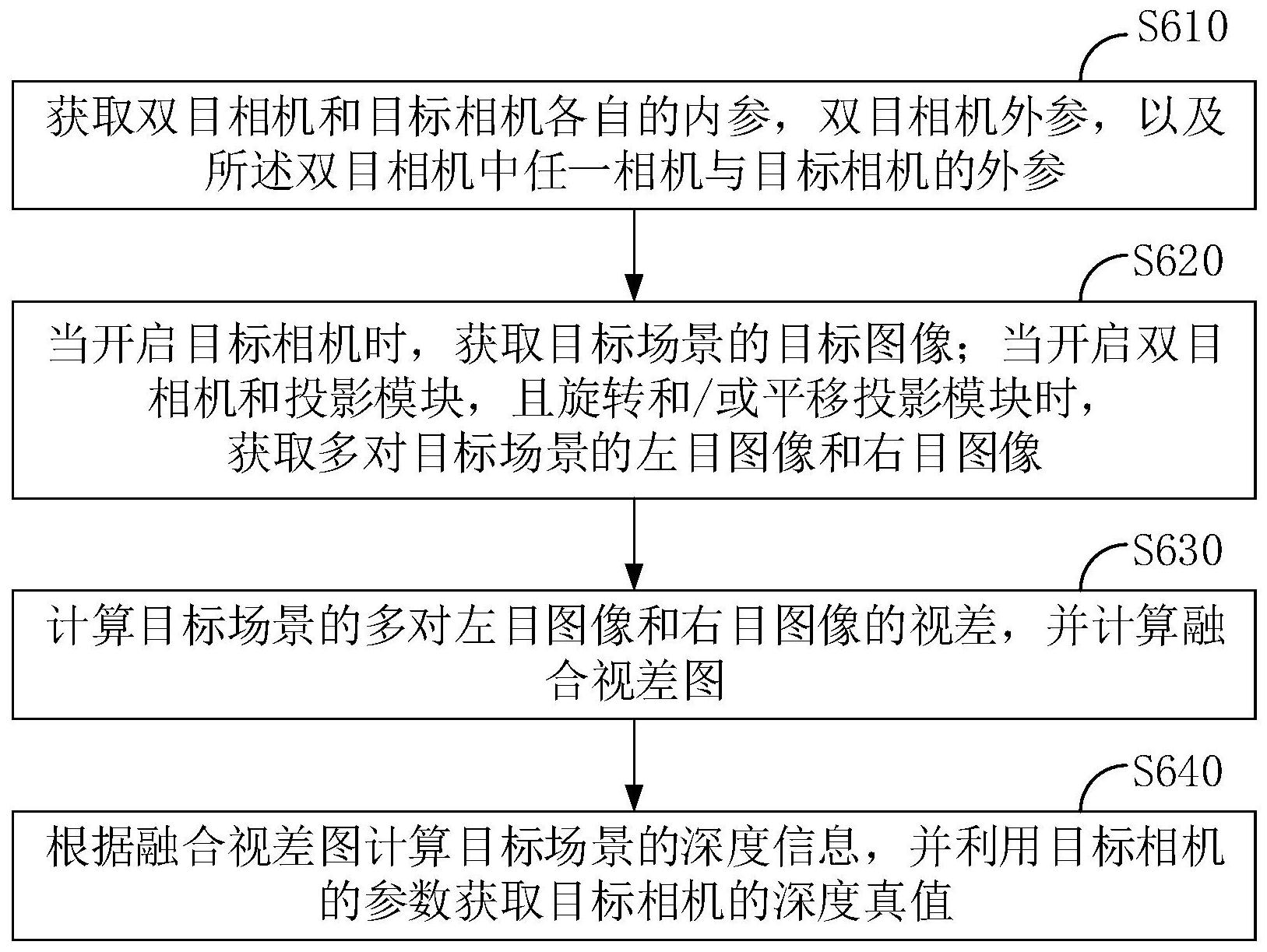
本申请适用于计算机视觉和相机标定技术领域,提供了一种深度真值获取方法、装置、系统及深度相机,该深度真值获取方法包括:获取双目相机和目标相机各自的内参,双目相机外参,以及所述双目相机中任一相机与目标相机的外参;当开启目标相机时,获取目标场景的目标图像;当开启双目相机和投影模块,且旋转和/或平移投影模块时,获取多对目标场景的左目图像和右目图像;计算目标场景的多对左目图像和右目图像的视差,并计算融合视差图;根据融合视差图计算目标场景的深度信息,并利用目标相机的内参和外参获取目标相机的深度真值。本申请实施例可以便捷地生成与目标设备中成像器件逐像素对齐的高精度深度图。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有