

授权公布号:CN111639591B
轨迹预测模型生成方法、装置、可读存储介质及电子设备
有效
申请
2020-05-28
申请公布
2020-09-08
授权
2023-06-30
预估到期
2040-05-28
| 申请号 | CN202010469558.X |
| 申请日 | 2020-05-28 |
| 申请公布号 | CN111639591A |
| 申请公布日 | 2020-09-08 |
| 授权公布号 | CN111639591B |
| 授权公告日 | 2023-06-30 |
| 分类号 | G06V20/40;G06V10/82;G06N3/0464;G06N3/084;G06T7/20 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳地平线机器人科技有限公司 |
| 申请人地址 | 广东省深圳市前海深港合作区前湾一路1号A栋201室(入驻深圳市前海商务秘书有限公司) |
专利法律状态
2023-06-30
授权
状态信息
授权
2020-10-02
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20200528
2020-09-08
公布
状态信息
公布
摘要
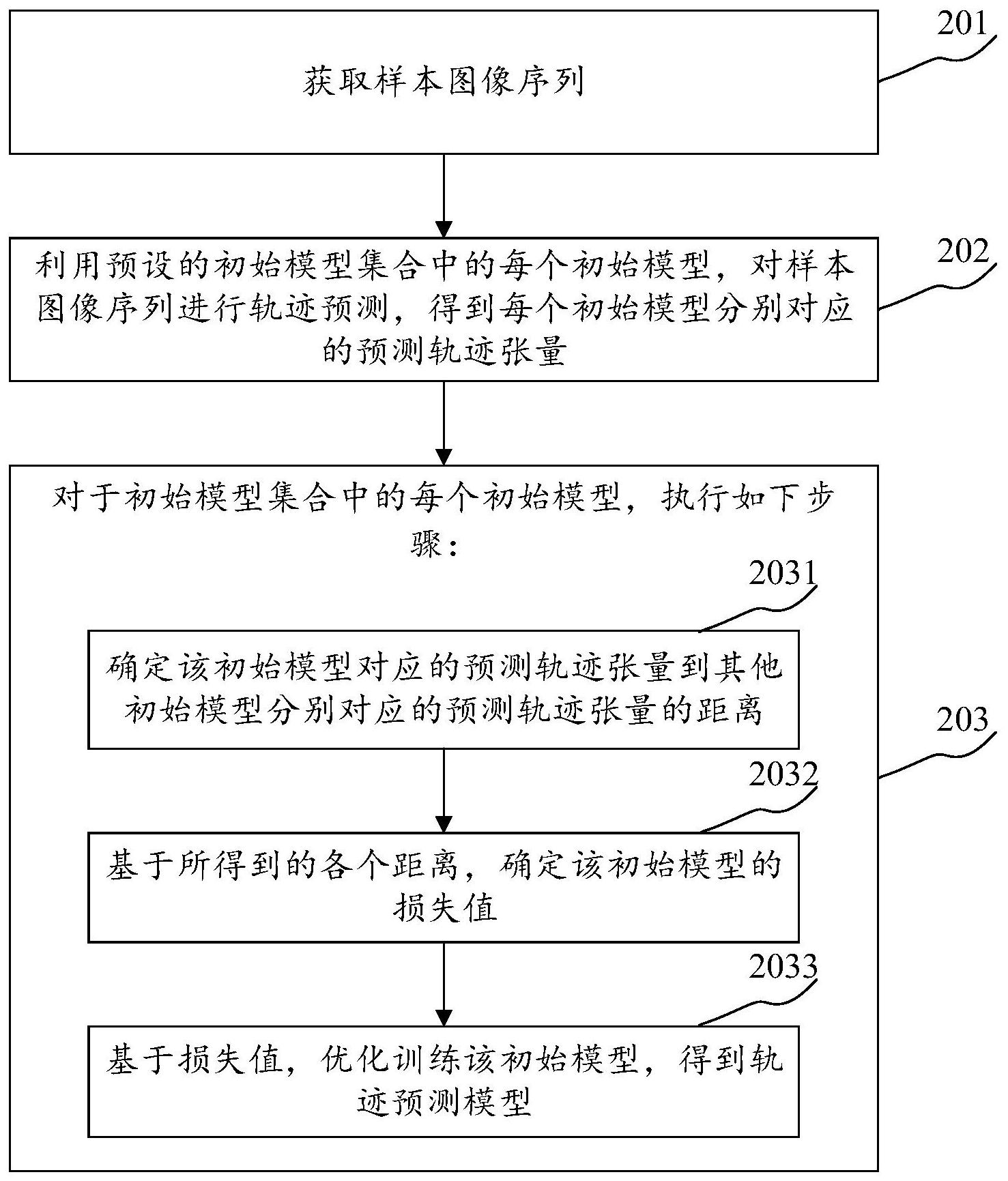
本公开实施例公开了一种轨迹预测模型生成方法和装置,其中,该方法包括:获取样本图像序列,其中,样本图像序列中的样本图像包括可移动物体;利用预设的初始模型集合中的每个初始模型,对样本图像序列进行轨迹预测,得到每个初始模型分别对应的预测轨迹张量,其中,预测轨迹张量用于表征可移动物体的移动轨迹;对于初始模型集合中的每个初始模型,确定该初始模型对应的预测轨迹张量到其他初始模型分别对应的预测轨迹张量的距离;基于所得到的各个距离,确定该初始模型的损失值;基于损失值,训练该初始模型,得到轨迹预测模型。本公开实施例可以提高模型的轨迹预测性能,有助于降低轨迹预测模型的复杂性,提高模型训练和模型应用的效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappbd
商务合作
chinappbd
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有