

授权公布号:CN110763233B
构建时空代价图的方法和装置
有效
申请
2018-07-27
申请公布
2020-02-07
授权
2021-05-25
预估到期
2038-07-27
| 申请号 | CN201810839673.4 |
| 申请日 | 2018-07-27 |
| 申请公布号 | CN110763233A |
| 申请公布日 | 2020-02-07 |
| 授权公布号 | CN110763233B |
| 授权公告日 | 2021-05-25 |
| 分类号 | G01C21/20 |
| 分类 | 测量;测试; |
| 申请人名称 | 深圳地平线机器人科技有限公司 |
| 申请人地址 | 广东省深圳市南山区粤海街道粤兴三道6号南京大学产学研基地B区601室 |
专利法律状态
2021-05-25
授权
状态信息
授权
2020-03-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/20;申请日:20180727
2020-02-07
公布
状态信息
公布
摘要
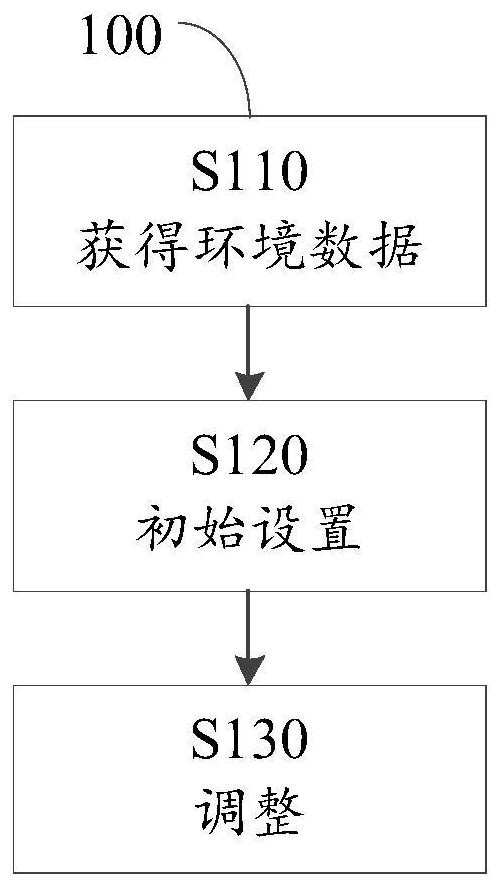
公开了一种构建时空代价图的方法和装置,该方法包括:获得至少两个离散时刻中的最先离散时刻的预定空间范围内的环境数据;根据所获得的环境数据对前述时空代价图的每个图层中的每个体素的代价值进行初始设置;以及对与前述至少两个离散时刻中不同于最先离散时刻的任何另一离散时刻相对应的图层中的一个或多个体素的代价值进行调整。通过该方法能够构建一种时空代价图,该时空代价图融合时间维度和空间维度的代价并且能够提供全局最优的规划轨迹。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappbd
商务合作
chinappbd
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有