

授权公布号:CN111723716B
确定目标对象朝向的方法、装置、系统、介质及电子设备
有效
申请
2020-06-11
申请公布
2020-09-29
授权
2024-03-08
预估到期
2040-06-11
| 申请号 | CN202010527892.6 |
| 申请日 | 2020-06-11 |
| 申请公布号 | CN111723716A |
| 申请公布日 | 2020-09-29 |
| 授权公布号 | CN111723716B |
| 授权公告日 | 2024-03-08 |
| 分类号 | G06V20/59;G06V10/774;G06V10/82;G06N3/0464;G06T7/50;G06T7/70 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳地平线机器人科技有限公司 |
| 申请人地址 | 广东省深圳市前海深港合作区前湾一路1号A栋201室(入驻深圳市前海商务秘书有限公司) |
专利法律状态
2024-03-08
授权
状态信息
授权
2020-10-27
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06K9/00;申请日:20200611
2020-09-29
公布
状态信息
公布
摘要
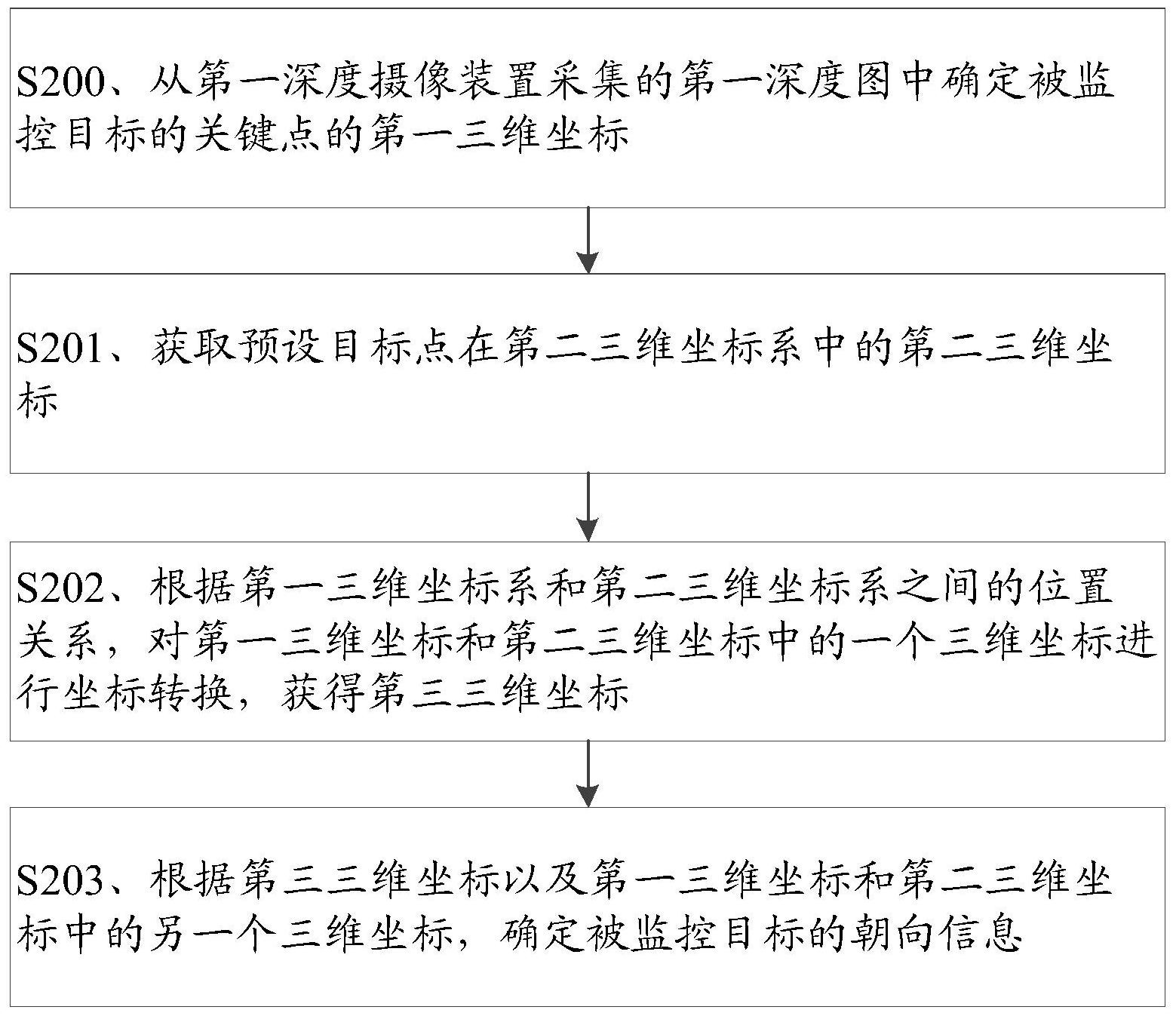
公开了一种确定目标对象朝向的方法、装置、系统、介质以及电子设备,其中的方法包括:从第一深度摄像装置采集的第一深度图中确定被监控目标的关键点的第一三维坐标;第一三维坐标为第一深度摄像装置的第一三维坐标系中的三维坐标;获取预设目标点在第二三维坐标系中的第二三维坐标;其中,预设目标点位于第一深度摄像装置的视野范围外;根据第一三维坐标系和第二三维坐标系间的位置关系,对第一三维坐标和第二三维坐标中的一个进行坐标转换,获得第三三维坐标;根据第三三维坐标及第一三维坐标和第二三维坐标中的另一,确定被监控目标的朝向信息。本公开不仅有利于降低确定目标对象朝向的成本,还有利于在狭小区域内实现确定目标对象的朝向。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有