

授权公布号:CN108961337B
车载相机航向角标定方法和装置、电子设备以及车辆
有效
申请
2018-06-15
申请公布
2018-12-07
授权
2020-11-24
预估到期
2038-06-15
| 申请号 | CN201810617190.X |
| 申请日 | 2018-06-15 |
| 申请公布号 | CN108961337A |
| 申请公布日 | 2018-12-07 |
| 授权公布号 | CN108961337B |
| 授权公告日 | 2020-11-24 |
| 分类号 | G06T7/73;G06T7/80;G01C22/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 深圳地平线机器人科技有限公司 |
| 申请人地址 | 广东省深圳市南山区粤海街道粤兴三道6号南京大学产学研基地B区601室 |
专利法律状态
2020-11-24
授权
状态信息
授权
2019-01-01
实质审查的生效
状态信息
实质审查的生效
2018-12-07
公布
状态信息
公布
摘要
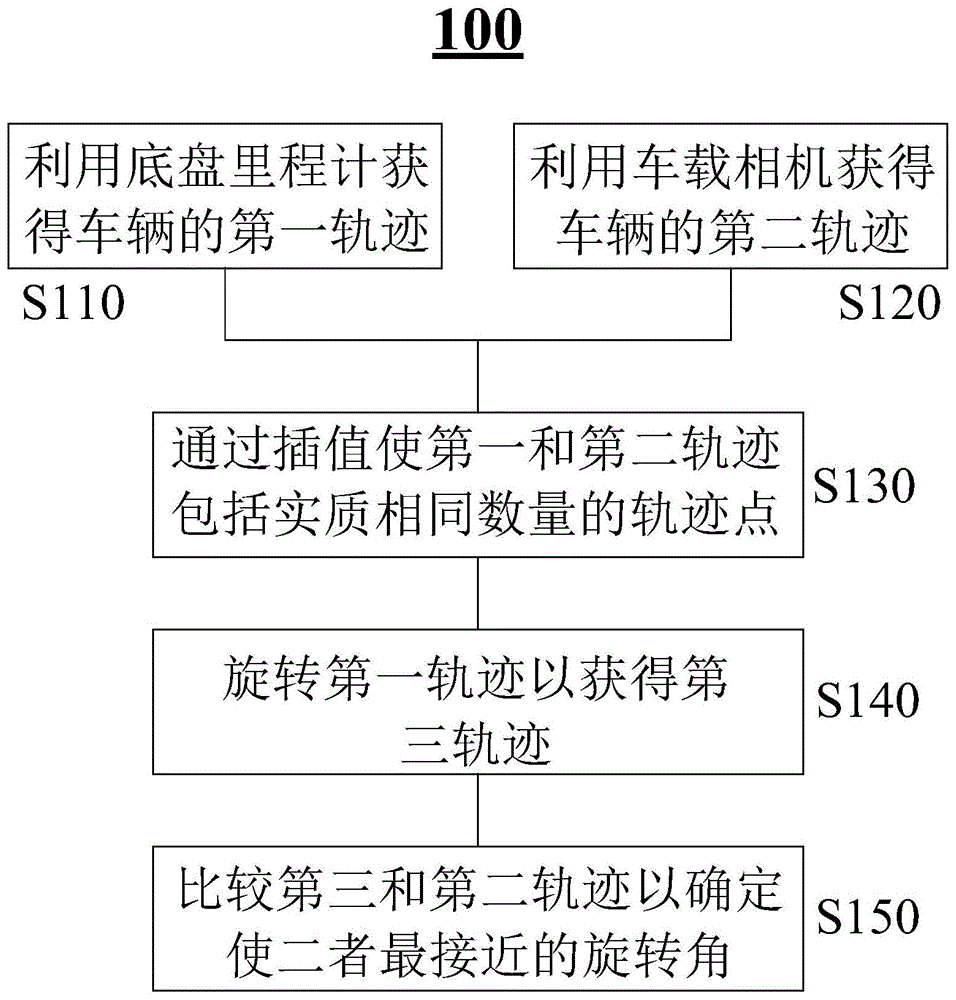
公开了一种车载相机航向角标定方法和装置、电子设备以及车辆。根据一实施例,一种车载相机航向角标定方法可包括:利用底盘里程计跟踪车辆的移动,获得与一移动距离对应的第一轨迹;利用车载相机跟踪车辆的移动,获得与所述移动距离对应的第二轨迹;使该第一轨迹旋转一航向角,获得第三轨迹;以及比较所述第三轨迹和所述第二轨迹,从而确定使所述第三轨迹最接近所述第二轨迹的航向角,作为所述车载相机的航向角。本发明的方法能够以全自动的方式,基于视觉里程计和底盘里程计对相机航向角进行实时在线标定,而不需要人工参与,因此能够广泛应用于自动驾驶等领域。
 客服微信号
客服微信号
 商务合作微信
商务合作微信
 关注公众号
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有