

授权公布号:CN111638717B
一种分布式自主机器人交通协调机制的设计方法
有效
申请
2020-06-06
申请公布
2020-09-08
授权
2023-11-07
预估到期
2040-06-06
| 申请号 | CN202010508800.X |
| 申请日 | 2020-06-06 |
| 申请公布号 | CN111638717A |
| 申请公布日 | 2020-09-08 |
| 授权公布号 | CN111638717B |
| 授权公告日 | 2023-11-07 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 浙江中力机械股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区浦沿街道伟业路1号3幢一层 |
专利法律状态
2023-11-07
授权
状态信息
授权
2022-05-13
著录事项变更
状态信息
著录事项变更;IPC(主分类):G05D1/02;变更事项:申请人;变更前:浙江科钛机器人股份有限公司;变更后:浙江科钛机器人股份有限公司;变更事项:地址;变更前:310053 浙江省杭州市滨江区浦沿街道伟业路1号3幢一层;变更后:310053 浙江省杭州市滨江区浦沿街道伟业路1号3幢一层;变更事项:申请人;变更前:浙江中力机械有限公司;变更后:浙江中力机械股份有限公司
2020-10-02
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200606
2020-09-08
公布
状态信息
公布
摘要
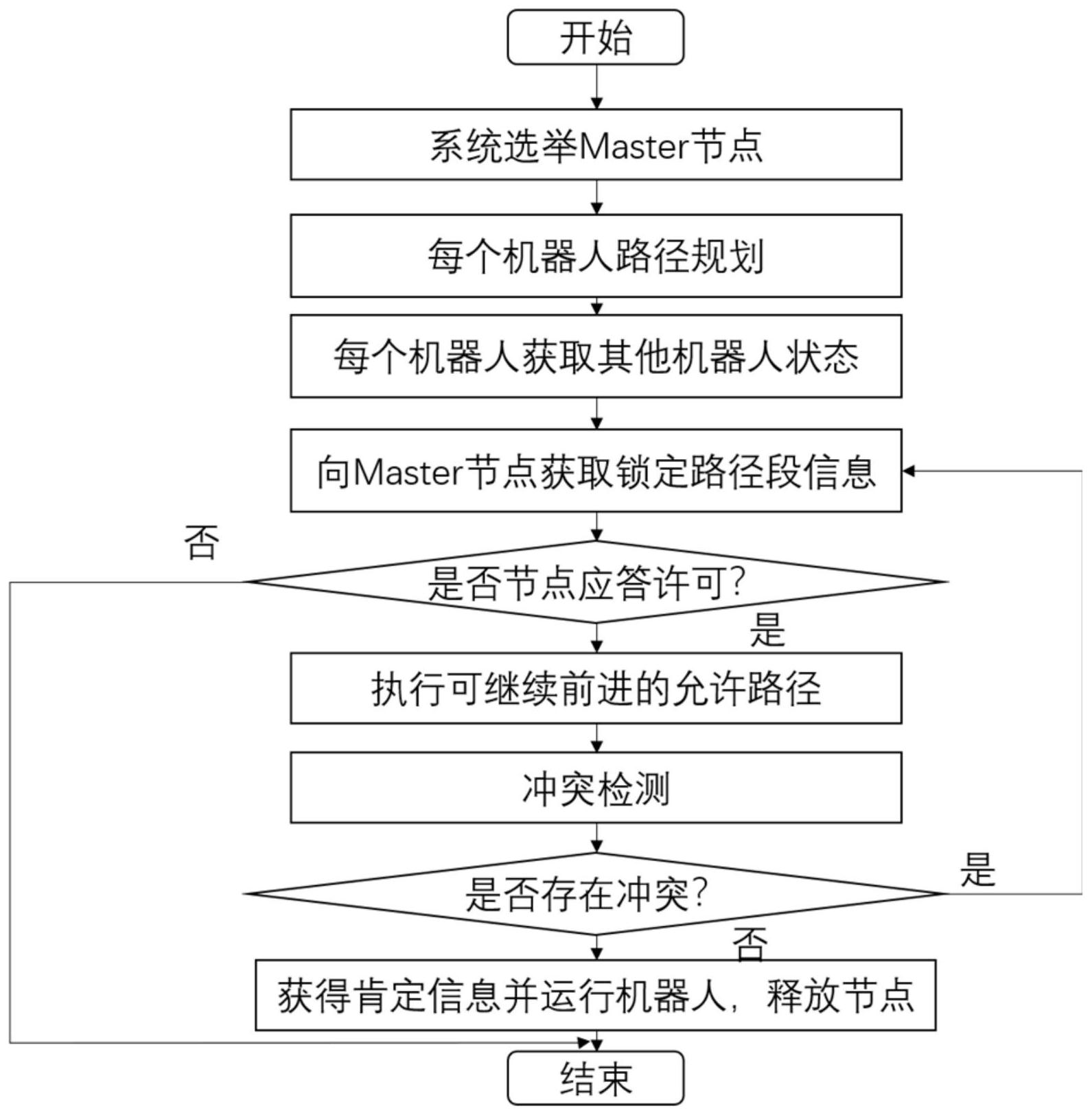
本发明公开了一种分布式自主机器人交通协调机制的设计方法,本发明的目的在于分布式网络环境中多个自主移动机器人在同一工作环境下执行任务时,如何解决机器人路径规划、路径冲突检测和冲突解决的问题,使得最终能够动态规划出所有机器人可高效运行、无碰撞、无相向冲突的可行路径。本发明采用分布式协调和自主决策的计算方法,实现多个机器人之间的交通协调,无需集中式后台服务器进行统一规划和计算,大大提升了多机器人协作系统的可扩展性和鲁棒性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有