

授权公布号:CN115115302B
基于仓储搬运机器人为主体的企业物流实现方法
有效
申请
2022-05-30
申请公布
2022-09-27
授权
2024-01-26
预估到期
2042-05-30
| 申请号 | CN202210600073.9 |
| 申请日 | 2022-05-30 |
| 申请公布号 | CN115115302A |
| 申请公布日 | 2022-09-27 |
| 授权公布号 | CN115115302B |
| 授权公告日 | 2024-01-26 |
| 分类号 | G06Q10/0835;G06Q10/087;B65G35/00;B65G57/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 浙江中力机械股份有限公司 |
| 申请人地址 | 浙江省湖州市安吉县递铺镇霞泉村 |
专利法律状态
2024-01-26
授权
状态信息
授权
2022-10-18
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06Q10/08;申请日:20220530
2022-09-27
公布
状态信息
公布
摘要
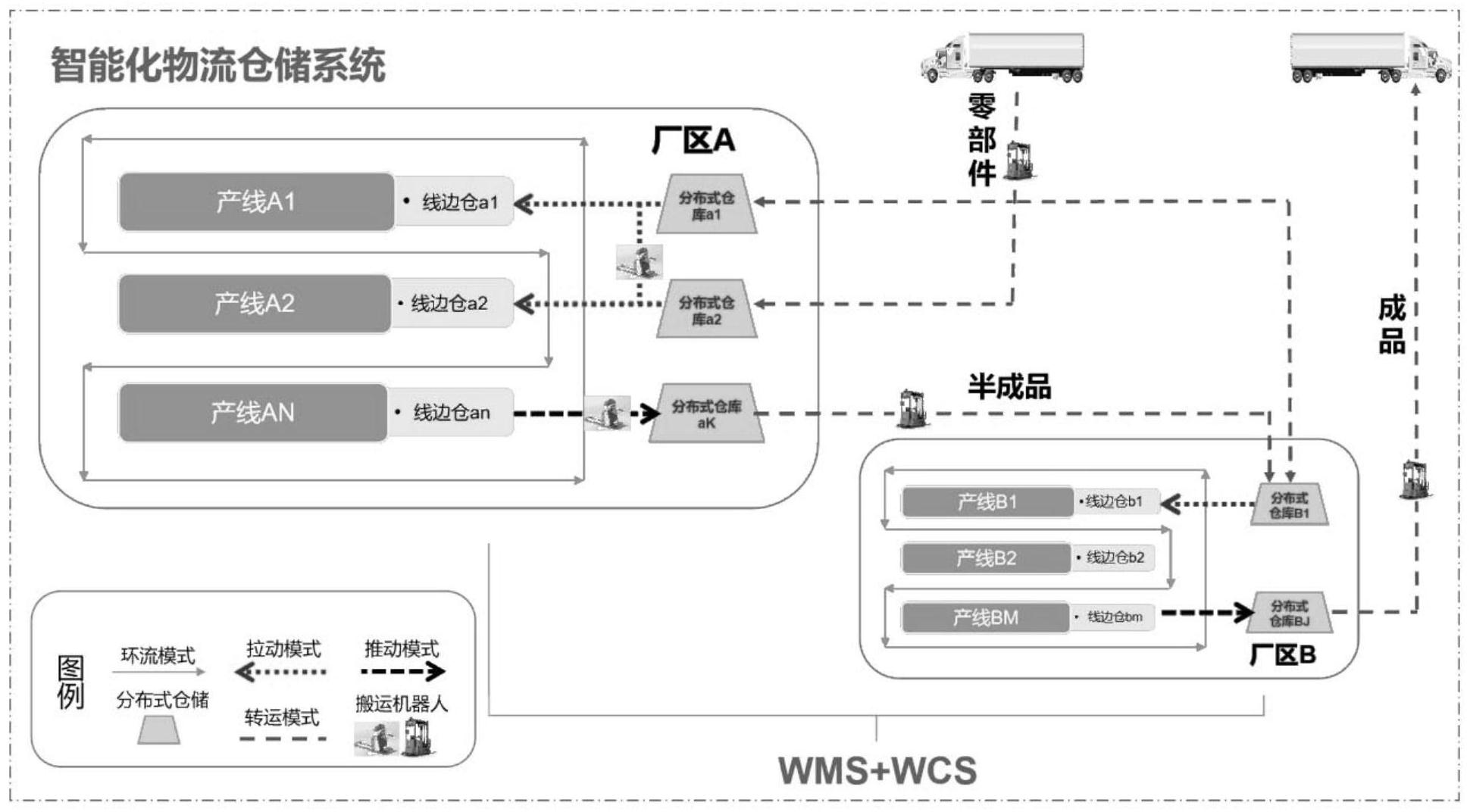
本发明涉及基于仓储搬运机器人为主体的企业物流实现方法,该方法采用智能物流仓储系统执行,系统包括自动搬运堆垛机器人、库位监控系统、标准料笼、WMS系统和WCS系统,自动搬运堆垛机器人用于实现对货物的自动搬运和堆垛等功能,库位监控系统通过高空相机对库位的监测,实现搬运任务的自动触发,并关联WMS和WCS系统,实现对流转物料的统计;该系统运作时包括环流模式、拉动模式、推动模式、转运模式以及分布式仓储;本发明的方法完全实现基于生产需求的自动物料流转,彻底改变传统的物流模式。因为更少的人工参与,所以不会出现生产零部件短缺或者库存积压的问题,极大的提高企业生产效率并降低生产中库存积压成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有