

授权公布号:CN111813102B
一种分布式自主机器人环境地图构建方法
有效
申请
2020-06-06
申请公布
2020-10-23
授权
2023-11-21
预估到期
2040-06-06
| 申请号 | CN202010508807.1 |
| 申请日 | 2020-06-06 |
| 申请公布号 | CN111813102A |
| 申请公布日 | 2020-10-23 |
| 授权公布号 | CN111813102B |
| 授权公告日 | 2023-11-21 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 浙江中力机械股份有限公司 |
| 申请人地址 | 浙江省湖州市安吉县递铺镇霞泉村 |
专利法律状态
2023-11-21
授权
状态信息
授权
2022-05-10
著录事项变更
状态信息
著录事项变更;IPC(主分类):G05D1/02;变更事项:申请人;变更前:浙江中力机械有限公司;变更后:浙江中力机械股份有限公司;变更事项:地址;变更前:313300 浙江省湖州市安吉县递铺镇霞泉村;变更后:313300 浙江省湖州市安吉县递铺镇霞泉村;变更事项:申请人;变更前:浙江科钛机器人股份有限公司;变更后:浙江科钛机器人股份有限公司
2020-11-10
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200606
2020-10-23
公布
状态信息
公布
摘要
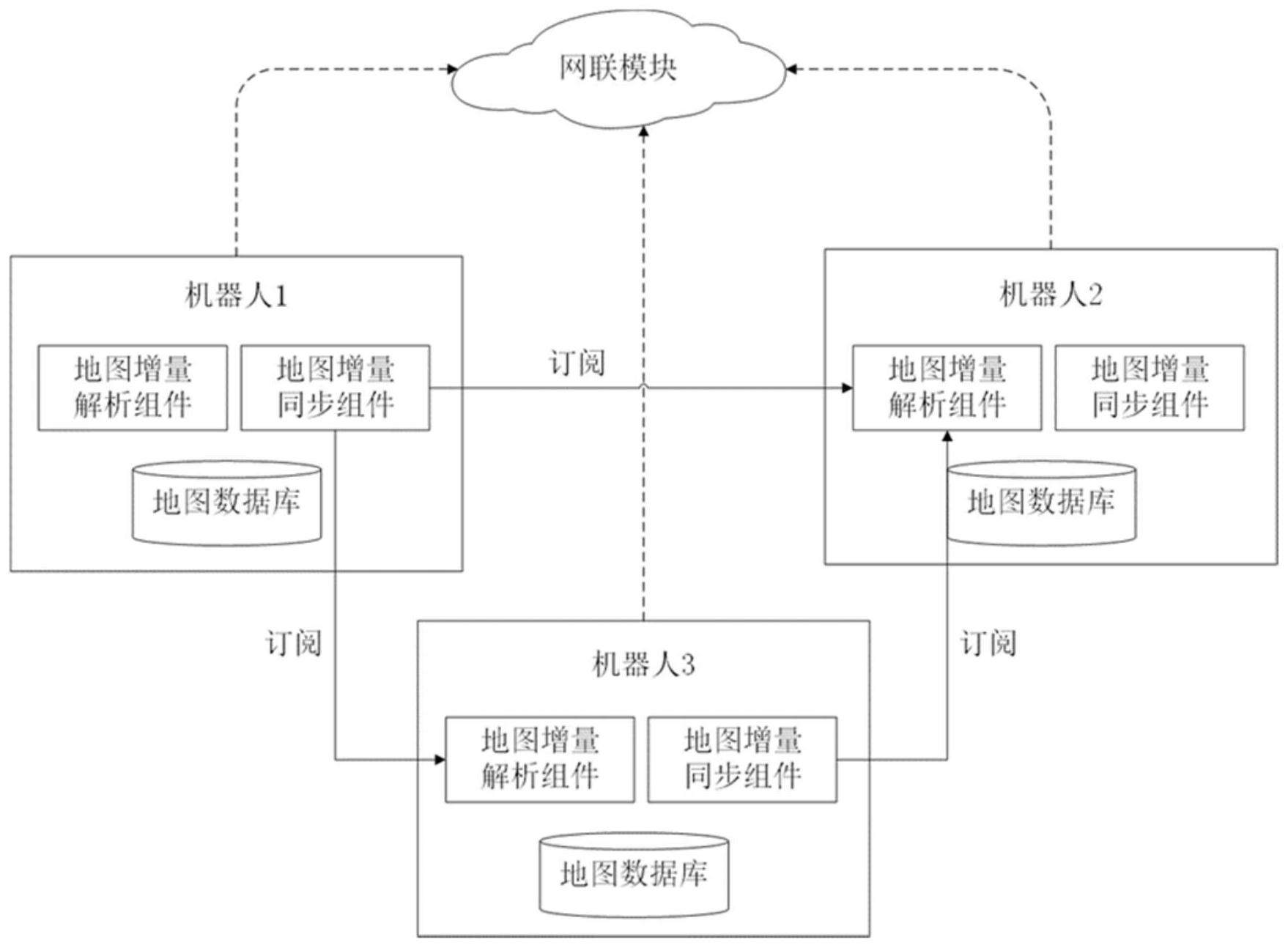
本发明公开了一种分布式自主机器人环境地图构建方法,首先通过寻找地图中的特征点构建每个机器人的局部地图,然后使用增量式地图更新方法更新地图信息,最后通过分布式地图融合方法,将每个机器人中的子图合并成一个全局地图;本发明使用完全分布式的自主机器人系统实现机器人之间的地图融合;每个机器人单独搭载地图构建方法,大大提升了多机器人拓扑网络的可扩展性和鲁棒性,同时减少单个机器人的计算负载,有利于自主机器人整体稳定性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有