

授权公布号:CN114577494B
夹持装置及确定夹持装置中行程曲线凸台所在曲线的方法
有效
申请
2022-03-28
申请公布
2022-06-03
授权
2024-02-02
预估到期
2042-03-28
| 申请号 | CN202210313612.0 |
| 申请日 | 2022-03-28 |
| 申请公布号 | CN114577494A |
| 申请公布日 | 2022-06-03 |
| 授权公布号 | CN114577494B |
| 授权公告日 | 2024-02-02 |
| 分类号 | G01M17/013;B25B11/00;CN110842826A,2020.02.28;CN211122005U,2020.07.28;CN105480215A,2016.04.13;CN112046195A,2020.12.08;CN113477991A,2021.10.08;WO2021254398A1,2021.12.23王振兵;彭飞;李关章;.基于Pro/E的棘轮机构的运动仿真及动态分析.起重运输机械.2011,(第04期),全文. |
| 分类 | 测量;测试; |
| 申请人名称 | 深圳市道通科技股份有限公司 |
| 申请人地址 | 广东省深圳市南山区西丽街道学苑大道1001号智园B1栋7层、8层、10层 |
专利法律状态
2024-02-02
授权
状态信息
授权
2022-06-03
公布
状态信息
公布
摘要
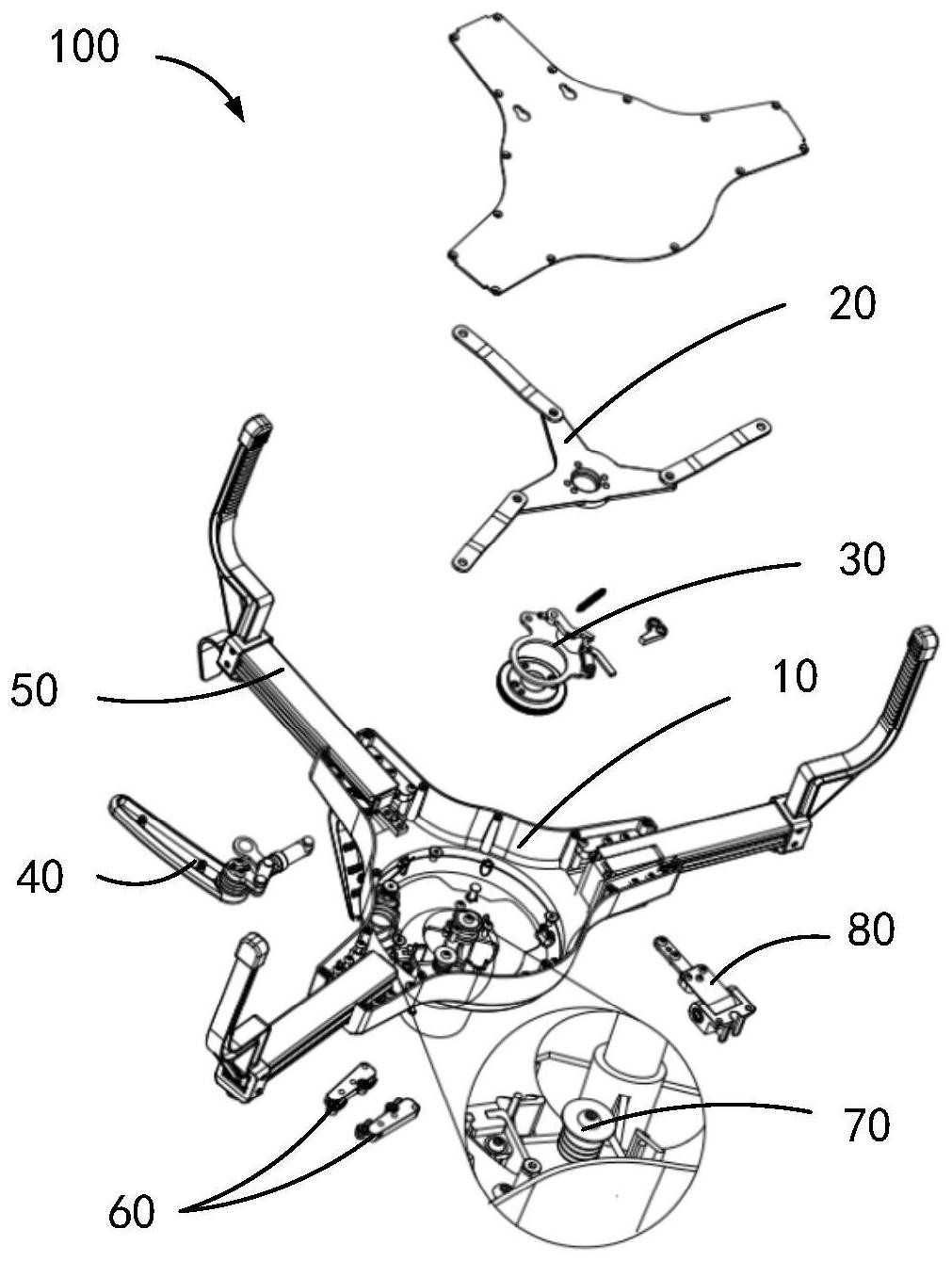
本申请实施例涉及交通工具设备技术领域,公开了一种夹持装置及确定夹持装置中行程曲线凸台所在曲线的方法,夹持装置采用了转动模块包括转动板和连杆,连杆分别与夹持模块和转动板转动连接,转动板设有行程曲线凸台,啮合模块包括棘轮和棘齿组件,棘齿组件始终与行程曲线凸台抵接,以调节棘齿组件和棘轮的啮合位置的技术方案,克服了夹持装置在第一驱动模块转动相同角度时,夹持模块相对于安装座的缩进距离不一致的技术问题,达到了夹持模块在不同位置时,第一驱动模块在棘齿组件和棘轮啮合后转动至终止位置的过程中,夹持模块相对于安装座的缩进距离保持相同的技术效果。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有