

授权公布号:CN213890049U
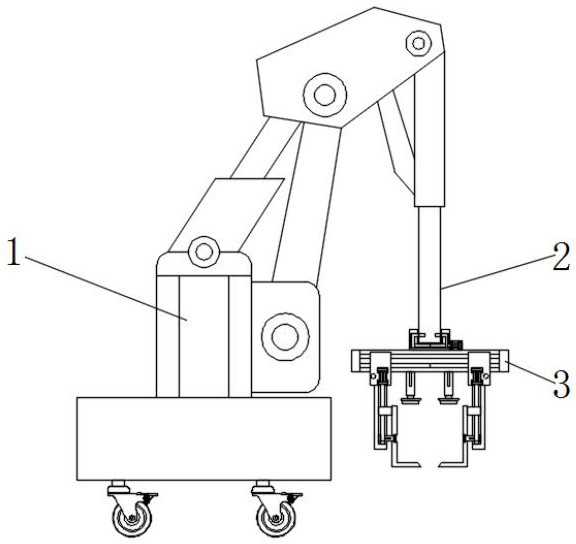
一种便于抓手结构调节的码垛机器人
有效
申请
2020-11-18
申请公布
1970-01-01
授权
2021-08-06
预估到期
2030-11-18
| 申请号 | CN202022680616.1 |
| 申请日 | 2020-11-18 |
| 授权公布号 | CN213890049U |
| 授权公告日 | 2021-08-06 |
| 分类号 | B25J15/00;B25J15/02;B65G61/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 青岛鸿福居建筑科技有限公司 |
| 申请人地址 | 山东省青岛市即墨市青岛汽车产业新城青威路970号 |
专利法律状态
2021-08-06
授权
状态信息
授权
摘要
本实用新型公开了一种便于抓手结构调节的码垛机器人,包括机器人本体和第二挤压垫,所述机器人本体的一侧安装有伸缩杆,所述伸缩杆的一端设置有固定板;所述连接杆的一侧安装有第一液压杆,所述第一液压杆的一端连接有第一挤压垫,靠近第一挤压垫的所述抓手的一侧开设有凹槽,所述固定板的底部安装有第二液压杆,所述第二挤压垫连接在第二液压杆的一端。该便于抓手结构调节的码垛机器人,设置有调节块,当所需码垛的货物较高时,可以启动第二电机,第二电机带动螺纹杆转动,螺纹杆转动带动调节块沿着导向杆的方向下移,调节块下移带动抓手下移,使抓手距离固定板的高度增大,使抓手能够将较高的货物抓起,便于调节。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有