

授权公布号:CN109926772B
一种钻杆焊接机器人生产线
有效
申请
2019-04-26
申请公布
2019-06-25
授权
2021-05-14
预估到期
2039-04-26
| 申请号 | CN201910343612.3 |
| 申请日 | 2019-04-26 |
| 申请公布号 | CN109926772A |
| 申请公布日 | 2019-06-25 |
| 授权公布号 | CN109926772B |
| 授权公告日 | 2021-05-14 |
| 分类号 | B23K37/00 |
| 分类 | 机床;不包含在其他类目中的金属加工; |
| 申请人名称 | 成都焊研威达科技股份有限公司 |
| 申请人地址 | 四川省成都市青白江区华金大道一段388号 |
专利法律状态
2021-05-14
授权
状态信息
授权
2019-07-19
实质审查的生效
状态信息
实质审查的生效
2019-06-25
公布
状态信息
公布
摘要
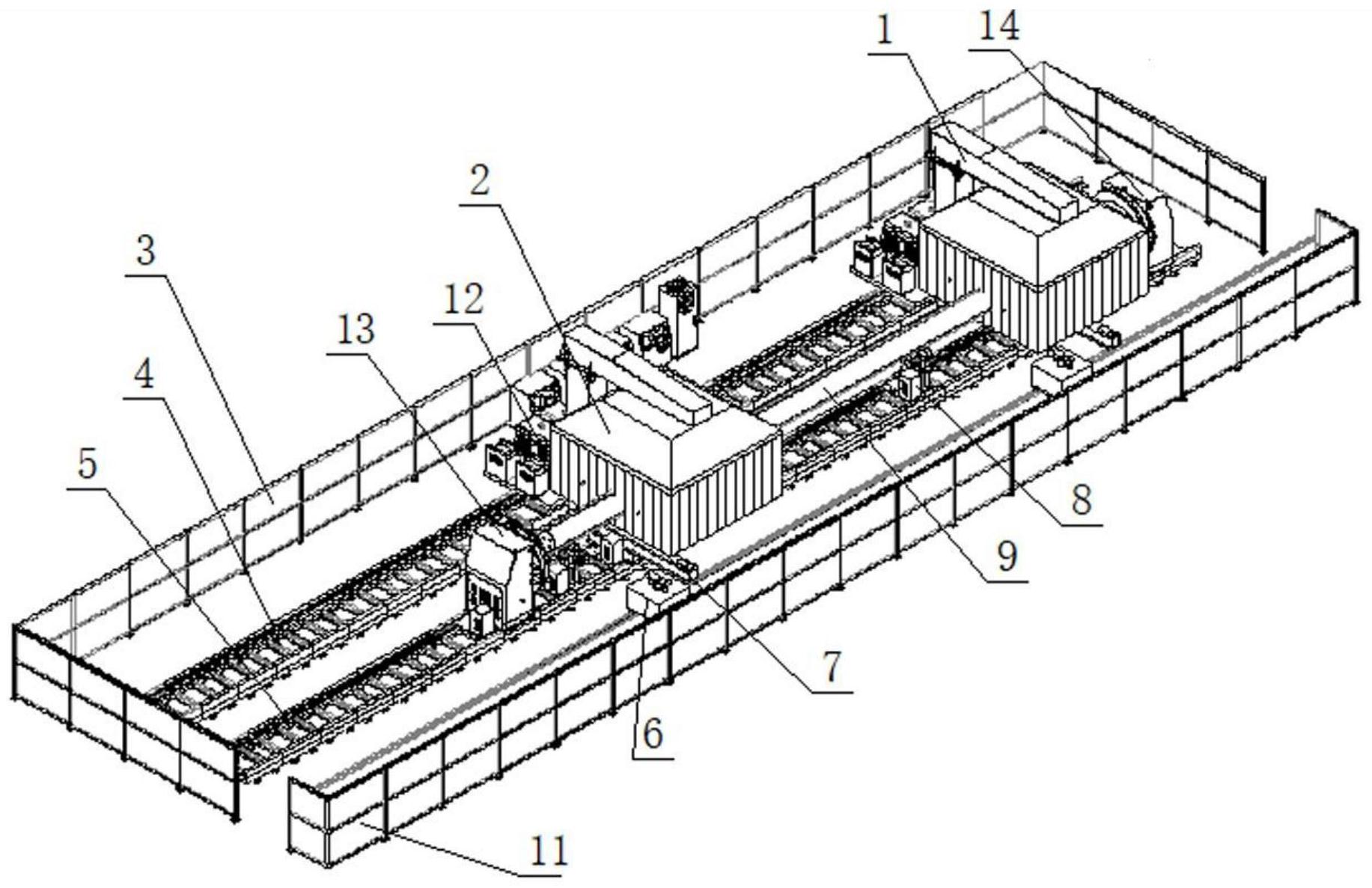
本发明公开了一种钻杆焊接机器人生产线,包括变位机移动轨道、变位机和机器人移动轨道,机器人移动轨道上安装悬臂,悬臂倒挂设置有机器人,还包括移动小车、接送料装置和辅助支撑装置,可移动变位机包括变位机头座和变位机尾座。还公开了一种自动焊接方法,包括:移动小车将钻杆工件传至接送料装置,接送料装置将钻杆工件放置于辅助支撑上面;辅助支撑自动调节高度,方便电动卡盘固定钻杆工件;机器人自动完成焊接工作;辅助支撑将钻杆工件放置于接送料装置上面,并由移动小车运走完成下料。本发明中机器人可同时焊接同一工件的不同位置,极大了提高了生产效率,能够实现工件的快速换型;完成自动接送料,联通前后工序,提高了自动化程度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有