

授权公布号:CN112648994B
基于深度视觉里程计和IMU的相机位姿估计方法及装置
有效
申请
2020-12-14
申请公布
2021-04-13
授权
2023-12-05
预估到期
2040-12-14
| 申请号 | CN202011476504.2 |
| 申请日 | 2020-12-14 |
| 申请公布号 | CN112648994A |
| 申请公布日 | 2021-04-13 |
| 授权公布号 | CN112648994B |
| 授权公告日 | 2023-12-05 |
| 分类号 | G01C21/16;G01C21/14;G06T7/00 |
| 分类 | 测量;测试; |
| 申请人名称 | 首都信息发展股份有限公司 |
| 申请人地址 | 北京市海淀区西三环中路11号(中央电视塔底座北门) |
专利法律状态
2023-12-05
授权
状态信息
授权
2021-10-26
著录事项变更
状态信息
著录事项变更;IPC(主分类):G01C21/16;变更事项:发明人;变更前:周宏伟 陈丽敏 乔秀全 赵鸿儒;变更后:周宏伟 陈利敏 乔秀全 赵鸿儒
2021-04-30
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/16;申请日:20201214
2021-04-13
公布
状态信息
公布
摘要
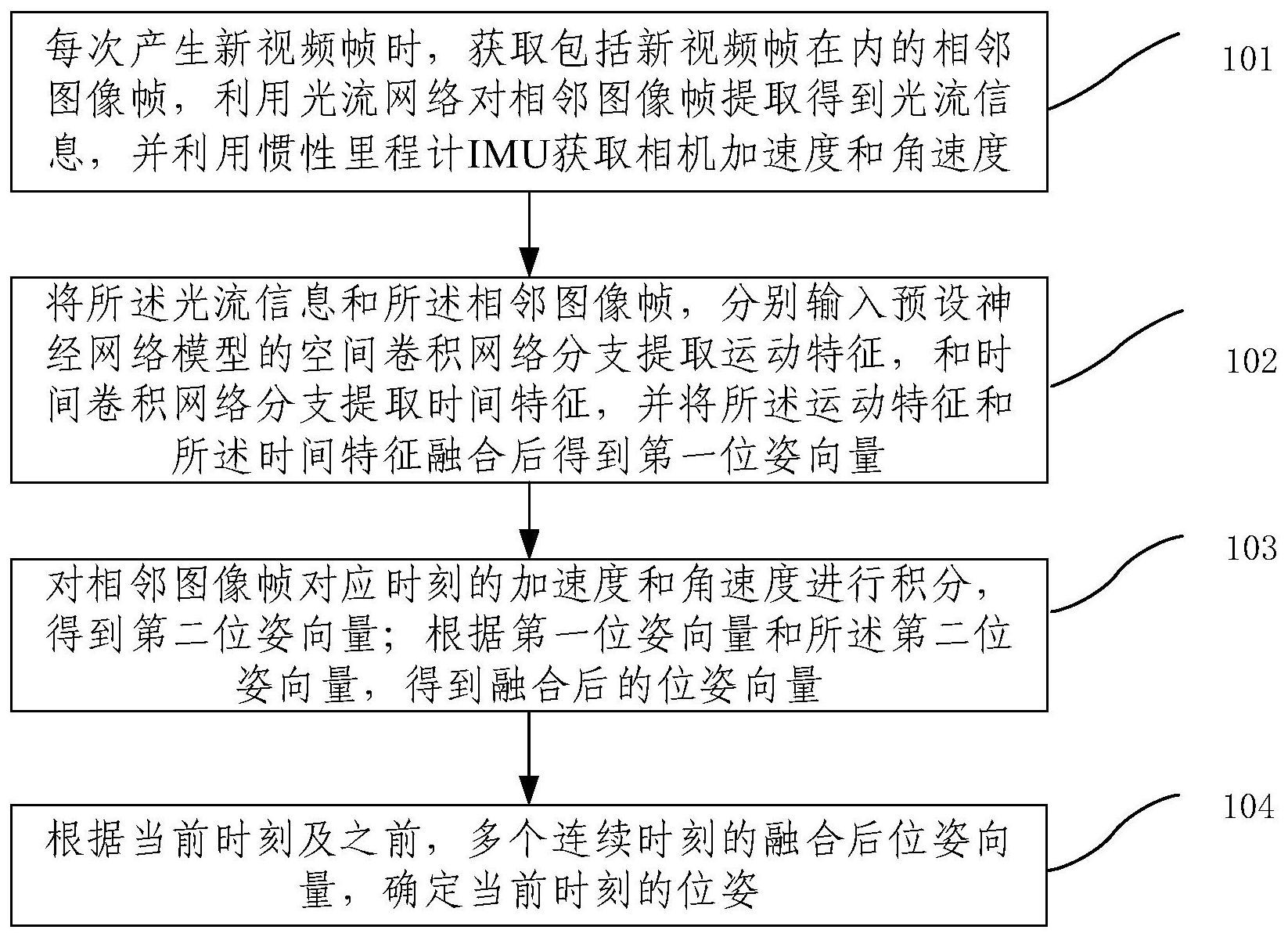
本发明实施例提供一种基于深度视觉里程计和IMU的相机位姿估计方法及装置,该方法包括:利用光流网络对相邻图像帧提取特征得到光流信息,并利用IMU获取相机加速度和角速度;将光流信息和相邻图像帧,分别输入预设神经网络模型的空间卷积网络分支提取运动特征,和时间卷积网络分支提取时间特征,并将运动特征和时间特征融合后得到第一位姿向量;对相邻图像帧对应时刻的加速度和角速度进行积分,得到第二位姿向量;根据第一位姿向量和第二位姿向量,得到融合后的位姿向量;根据当前时刻及之前,多个连续时刻的融合后位姿向量,确定当前时刻的位姿。该方法可分离性强、精度高、计算量低,能够适用于纹理缺失和实时性要求高等复杂场景。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有