

授权公布号:CN105730574B
踏板连接机构及采用该踏板连接机构的电动平衡车
有效
申请
2016-02-03
申请公布
2016-07-06
授权
2018-08-17
预估到期
2036-02-03
| 申请号 | CN201610077468.X |
| 申请日 | 2016-02-03 |
| 申请公布号 | CN105730574A |
| 申请公布日 | 2016-07-06 |
| 授权公布号 | CN105730574B |
| 授权公告日 | 2018-08-17 |
| 分类号 | B62J25/00;B62K3/00;B62K11/00 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 浙江瑞萌威电子科技有限公司 |
| 申请人地址 | 浙江省金华市武义县桐琴镇五金机械工业园区 |
专利法律状态
2018-08-17
授权
状态信息
授权
2016-10-26
专利申请权、专利权的转移
状态信息
专利申请权的转移;IPC(主分类):B62J25/00;登记生效日:20161010;变更事项:申请人;变更前:深圳市高斯拓普科技有限公司;变更后:浙江瑞萌威电子科技有限公司;变更事项:地址;变更前:518000 广东省深圳市龙岗区龙城街道龙西社区五联路21号宝鹰工业区C区2栋3楼;变更后:321200 浙江省金华市武义县桐琴镇五金机械工业园区
2016-08-03
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B62J25/00;申请日:20160203
2016-07-06
公布
状态信息
公布
摘要
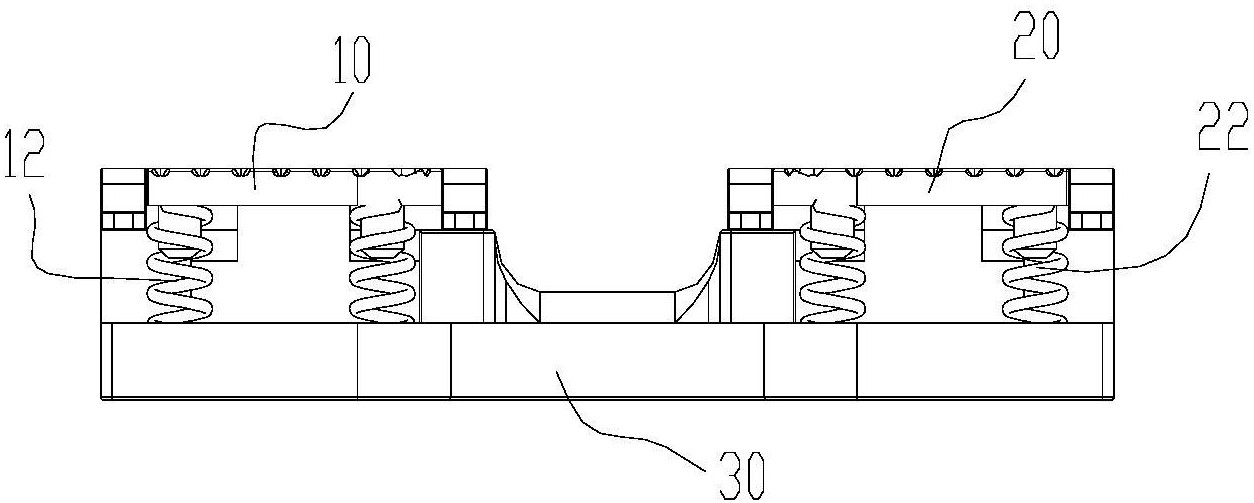
本发明提供了踏板连接机构,包括左、右踏板和横向连接件;沿左踏板的底部设置有第一柱形轴;横向连接件的顶壁左侧设置有第一支撑件,第一支撑件上设置有第一凹槽;第一柱形轴设置在第一凹槽内,使得左踏板以可转动的方式与第一支撑件连接;沿右踏板的底部设置有第二柱形轴;横向连接件的顶壁右侧设置有第二支撑件,第二支撑件上设置有第二凹槽;第二柱形轴设置在第二凹槽内,使得右踏板以可转动的方式与第二支撑件连接。本发明还提供了采用该踏板连接机构的电动平衡车。左踏板和右踏板并非通过中间轴进行连接,它们的运动状态分别通过左脚和右脚独立控制,横向连接件分担人体重力,受力均匀,平衡车灵活,经久耐用。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有