

授权公布号:CN110954091B
一种带有姿态检测的智能渔轮
有效
申请
2019-12-05
申请公布
2020-04-03
授权
2023-06-16
预估到期
2039-12-05
| 申请号 | CN201911230944.7 |
| 申请日 | 2019-12-05 |
| 申请公布号 | CN110954091A |
| 申请公布日 | 2020-04-03 |
| 授权公布号 | CN110954091B |
| 授权公告日 | 2023-06-16 |
| 分类号 | G01C21/10;A01K89/00 |
| 分类 | 测量;测试; |
| 申请人名称 | 南京快轮智能科技有限公司 |
| 申请人地址 | 江苏省南京市栖霞区新港开发区兴智路6-3兴智科技园B-15F |
专利法律状态
2023-06-16
授权
状态信息
授权
2020-05-01
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/10;申请日:20191205
2020-04-03
公布
状态信息
公布
摘要
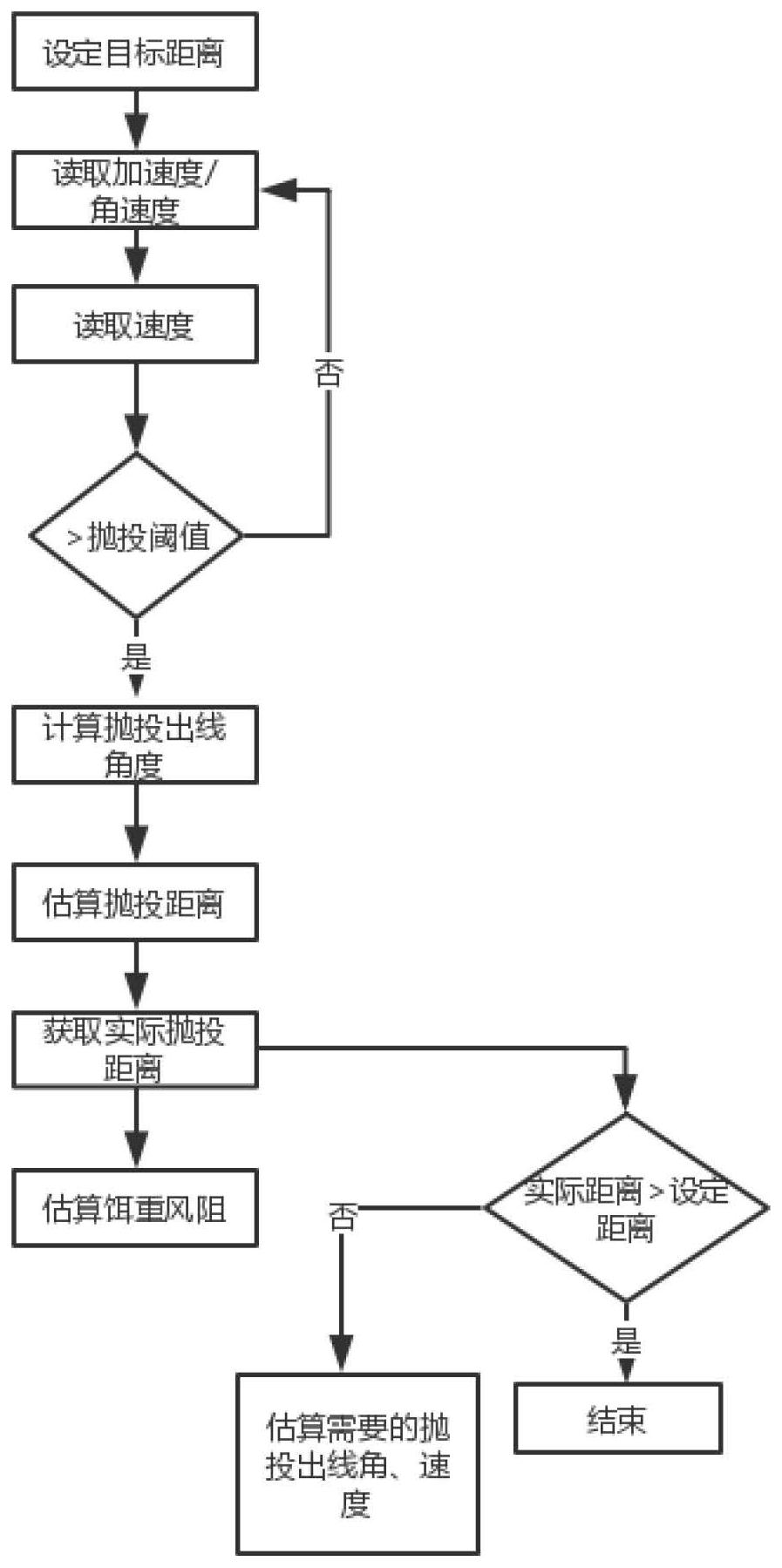
本发明公开了一种带有姿态检测的智能渔轮,包括控制单元,以及与控制单元通信连接的姿态检测单元,姿态检测单元包括陀螺仪和加速度计;S1,当需要抛投鱼竿时,设定目标距离;S2,姿态检测单元建立三轴坐标系,并测量三轴的角速度、三轴加速度;S3,控制单元采集姿态检测单元的测量值,从而获得此时鱼竿的角度;控制单元根据目标距离计算出抛投时的抛投角、出线时的速度。本发明还公开一种包括电源管理模块、刹车单元、测速单元、姿态检测单元、无线通信模块、显示模块、控制单元的带有姿态检测的智能渔轮。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有