

授权公布号:CN105552689B
一种智能连接方法
有效
申请
2015-12-09
申请公布
2016-05-04
授权
2018-10-02
预估到期
2035-12-09
| 申请号 | CN201510909925.2 |
| 申请日 | 2015-12-09 |
| 申请公布号 | CN105552689A |
| 申请公布日 | 2016-05-04 |
| 授权公布号 | CN105552689B |
| 授权公告日 | 2018-10-02 |
| 分类号 | H01R43/26 |
| 分类 | 基本电气元件; |
| 申请人名称 | 云杉智慧新能源技术有限公司 |
| 申请人地址 | 广东省深圳市前海深港合作区前湾一路1号A栋201室 |
专利法律状态
2018-10-02
授权
状态信息
授权
2016-06-01
著录事项变更
状态信息
著录事项变更;IPC(主分类):H01R43/26;变更事项:申请人;变更前:云杉智慧新能源(深圳)有限公司;变更后:云杉智慧新能源技术有限公司;变更事项:地址;变更前:518000 广东省深圳市前海深港合作区前湾一路1号A栋201室;变更后:518000 广东省深圳市前海深港合作区前湾一路1号A栋201室
2016-06-01
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):H01R43/26;申请日:20151209
2016-05-04
公布
状态信息
公布
摘要
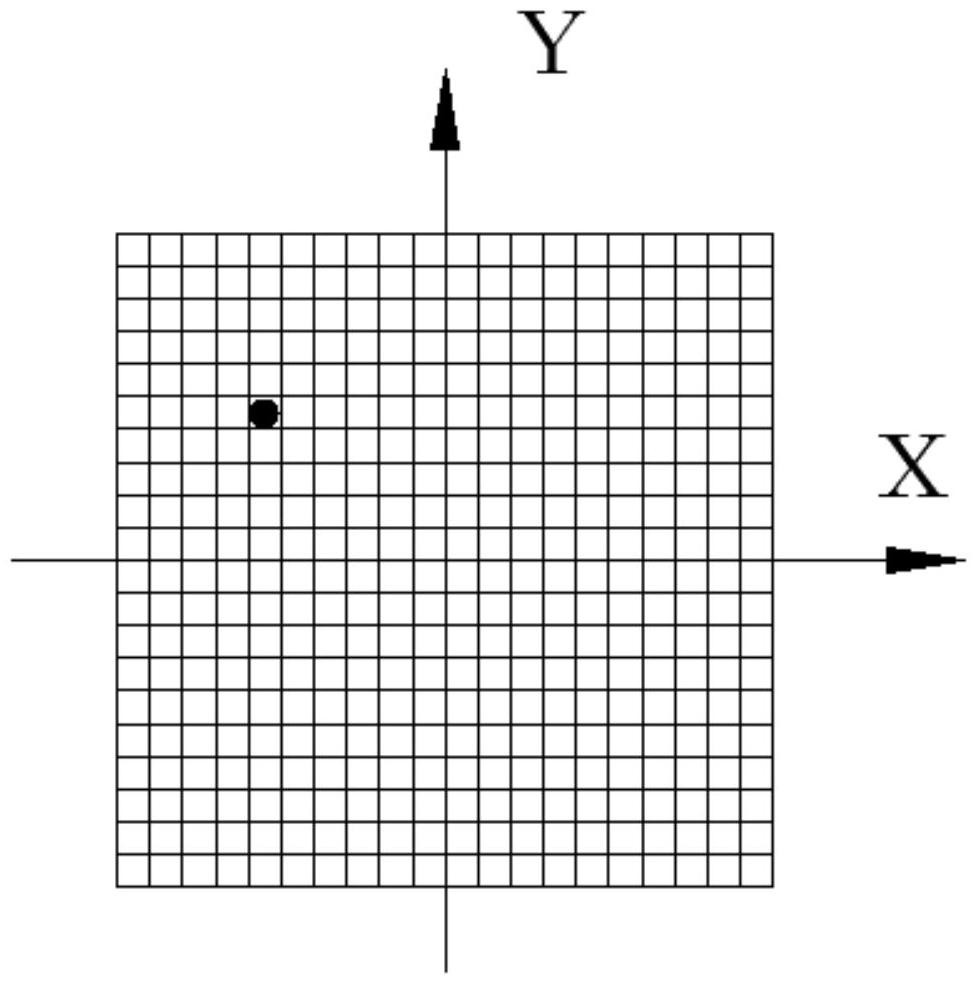
本发明提供了一种智能连接方法,其包括以下步骤:活动连接端在标准距离H0拍摄(L/d)*(L/d)张固定连接端定位点作为参考图像,将所述拍摄范围分割成(L/d)*(L/d)个栅格,所述各固定连接端定位点分别与所述各栅格一一对应;获取所述固定连接端与活动连接端的实际垂直距离H以及实时固定连接端定位点的对比坐标X=a,Y=b;获取固定连接端定位点的实际坐标值X=H*a/H0,Y=H*b/H0,控制活动连接端在X轴方向移动X=H*a/H0,在Y轴方向移动Y=H*b/H0;控制活动连接端向固定连接端的垂直方向移动H,完成活动连接端与固定连接端的定位连接。本发明不需要将活动连接端设置在准确的位置,可以自动定位计算活动连接端所在的位置,并自动移动活动连接端到固定连接端所在的位置,实现了连接的自动化控制。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有