

授权公布号:CN217728760U
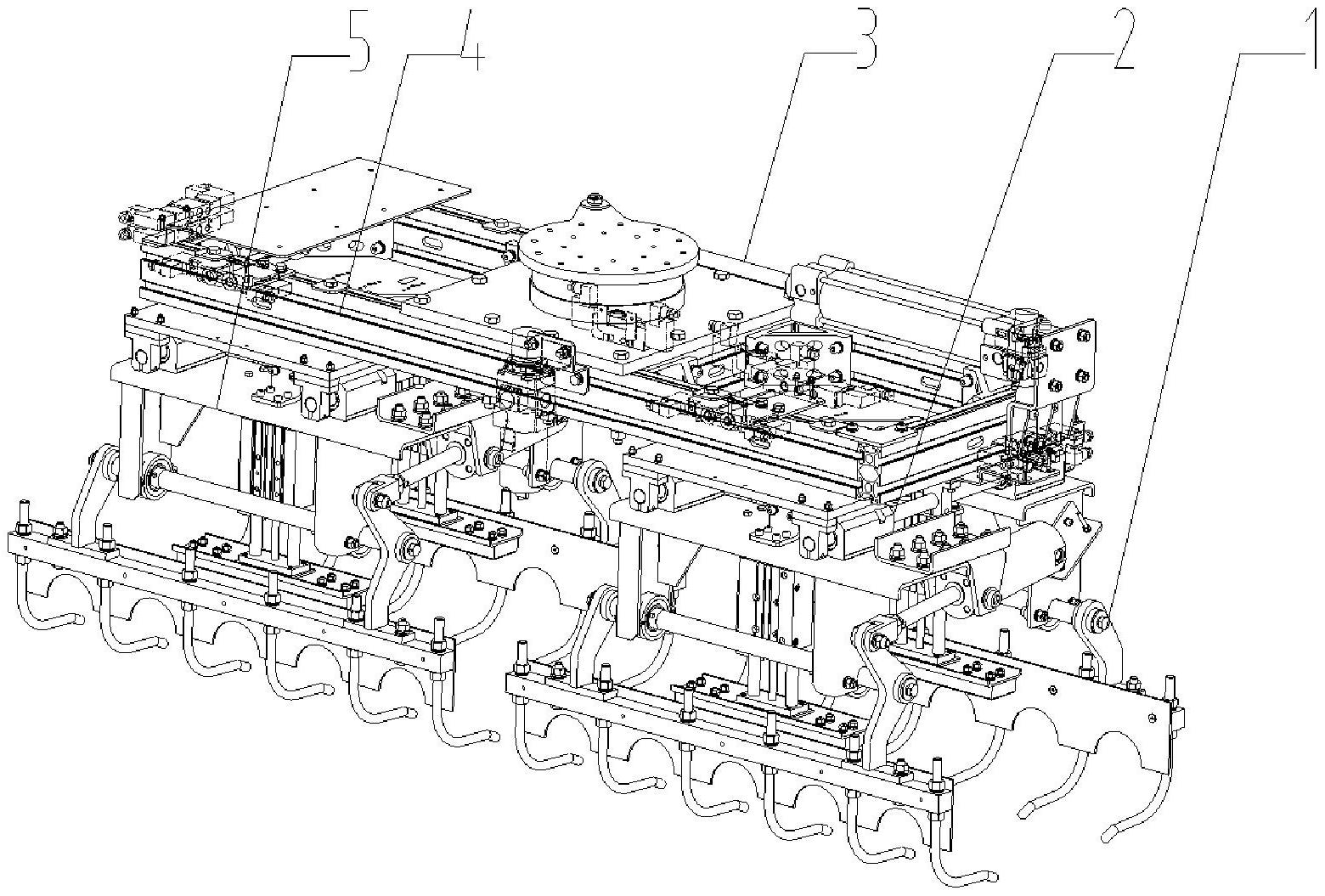
一种多功能可移动复合机械手
有效
申请
2022-04-19
申请公布
1970-01-01
授权
2022-11-04
预估到期
2032-04-19
| 申请号 | CN202220907244.8 |
| 申请日 | 2022-04-19 |
| 授权公布号 | CN217728760U |
| 授权公告日 | 2022-11-04 |
| 分类号 | B25J15/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 哈尔滨博实自动化股份有限公司 |
| 申请人地址 | 黑龙江省哈尔滨市道里区开发区迎宾路集中区东湖街9号 |
专利法律状态
2022-11-04
授权
状态信息
授权
摘要
本实用新型提出了一种多功能可移动复合机械手,属于物流机械技术领域。解决了传统的定位是采用直角坐标运动系统或者是机器人多轴运动的形式,机械手不参与物料定位和物料位置调整,且需要保证抓取的物料顺畅的滑落有着较大的摆动轮廓的问题。本实用新型的机械手有一套独立的手指开合机构,通过开合机构的可以实现物料在机械手内部移动并参与整套系统对物料的定位和位置调整,并且与手指摆臂机构形成复合作用达到局部避让的效果。此机械手结构紧凑,由于机械手的开合机构作用物料可以让其产生一定的位置移动,从而降低了手抓上方连接设备直角坐标或者机器人的运动行程,减小上方连接设备的主体尺寸,提高客户厂房的空间利用率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有