

授权公布号:CN110510105B
自动收放机翼、无人机及其控制方法
有效
申请
2019-08-21
申请公布
2019-11-29
授权
2024-02-13
预估到期
2039-08-21
| 申请号 | CN201910771721.5 |
| 申请日 | 2019-08-21 |
| 申请公布号 | CN110510105A |
| 申请公布日 | 2019-11-29 |
| 授权公布号 | CN110510105B |
| 授权公告日 | 2024-02-13 |
| 分类号 | B64C3/56;B64C19/00;G05D1/49 |
| 分类 | 飞行器;航空;宇宙航行; |
| 申请人名称 | 深圳飞马机器人股份有限公司 |
| 申请人地址 | 广东省深圳市南山区桃源街道长源社区学苑大道1001号南山智园A4栋1301 |
专利法律状态
2024-02-13
授权
状态信息
授权
2024-01-23
著录事项变更
状态信息
著录事项变更;IPC(主分类):B64C3/56;变更事项:申请人;变更前:深圳飞马机器人科技有限公司;变更后:深圳飞马机器人股份有限公司;变更事项:地址;变更前:518000 广东省深圳市南山区南头街道南头关二路智恒产业园16栋1楼;变更后:518000 广东省深圳市南山区桃源街道长源社区学苑大道1001号南山智园A4栋1301
2019-12-24
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B64C3/56;申请日:20190821
2019-11-29
公布
状态信息
公布
摘要
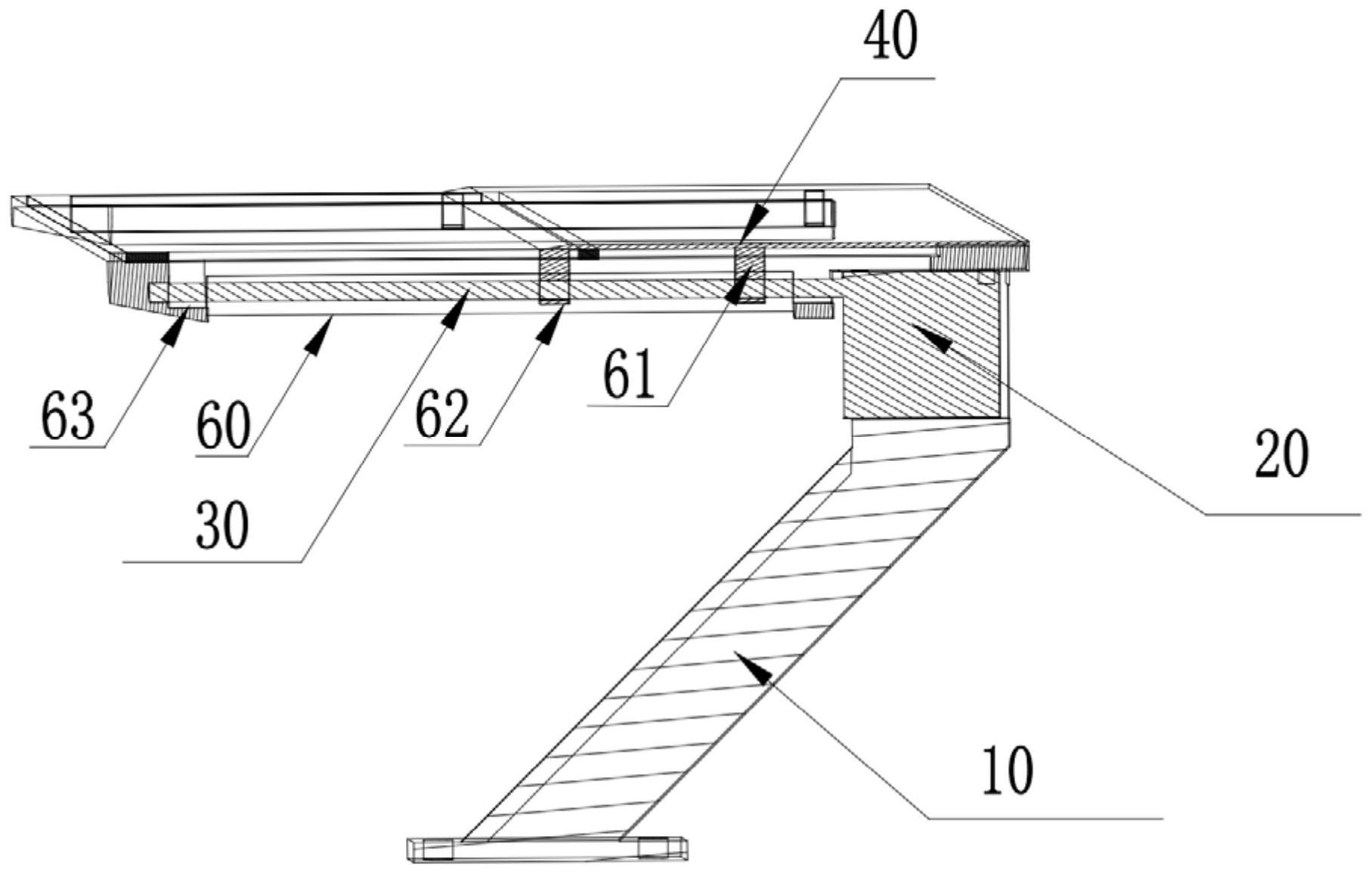
本申请实施例提供一种自动收放机翼,涉及飞行技术领域,该自动收放机翼包括机翼支架、驱动装置、丝杆和机翼滑片组,该机翼支架包括顶端平台和底端,该底端固定在该飞行器的上表面,该驱动装置安装在该机翼支架上,该丝杆与该驱动装置轴线锁附,该机翼滑片组包括多个机翼滑片,该多个机翼滑片上下叠加覆盖在该顶端平台的上表面,各该机翼滑片之间具有预设距离,各该机翼滑片与该丝杆轴线连接,与所述丝杆平行联动。本申请还提供了一种无人机及其控制方法,上述自动收放机翼、无人机及其控制方法可以减小无人机上升阻力,降低功耗。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有