

授权公布号:CN205632714U
一种轮式磁吸附爬壁机器人
有效
申请
2016-05-30
申请公布
1970-01-01
授权
2016-10-12
预估到期
2026-05-30
| 申请号 | CN201620506213.6 |
| 申请日 | 2016-05-30 |
| 授权公布号 | CN205632714U |
| 授权公告日 | 2016-10-12 |
| 分类号 | B62D57/024 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 哈工大机器人集团有限公司 |
| 申请人地址 | 黑龙江省哈尔滨市经开区哈平路集中区大连北路与兴凯路交口处 |
专利法律状态
2021-09-07
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):B62D 57/024;专利号:ZL2016205062136;变更事项:专利权人;变更前:哈工大机器人集团(哈尔滨)资产经营管理有限公司;变更后:哈工大机器人集团(哈尔滨)协同创新研究院有限公司;变更事项:地址;变更前:150000 黑龙江省哈尔滨市经开区哈平路集中区大连北路与兴凯路交口处;变更后:150000 黑龙江省哈尔滨市经开区哈平路集中区大连北路与兴凯路交口处
2017-02-08
专利申请权、专利权的转移
状态信息
专利权的转移;IPC(主分类):B62D 57/024;登记生效日:20170117;变更事项:专利权人;变更前权利人:哈工大机器人集团有限公司;变更后权利人:哈工大机器人集团(哈尔滨)资产经营管理有限公司;变更事项:地址;变更前权利人:150000 黑龙江省哈尔滨市经开区哈平路集中区大连北路与兴凯路交口处;变更后权利人:150000 黑龙江省哈尔滨市经开区哈平路集中区大连北路与兴凯路交口处
2016-10-12
实用新型专利权授予
状态信息
授权
摘要
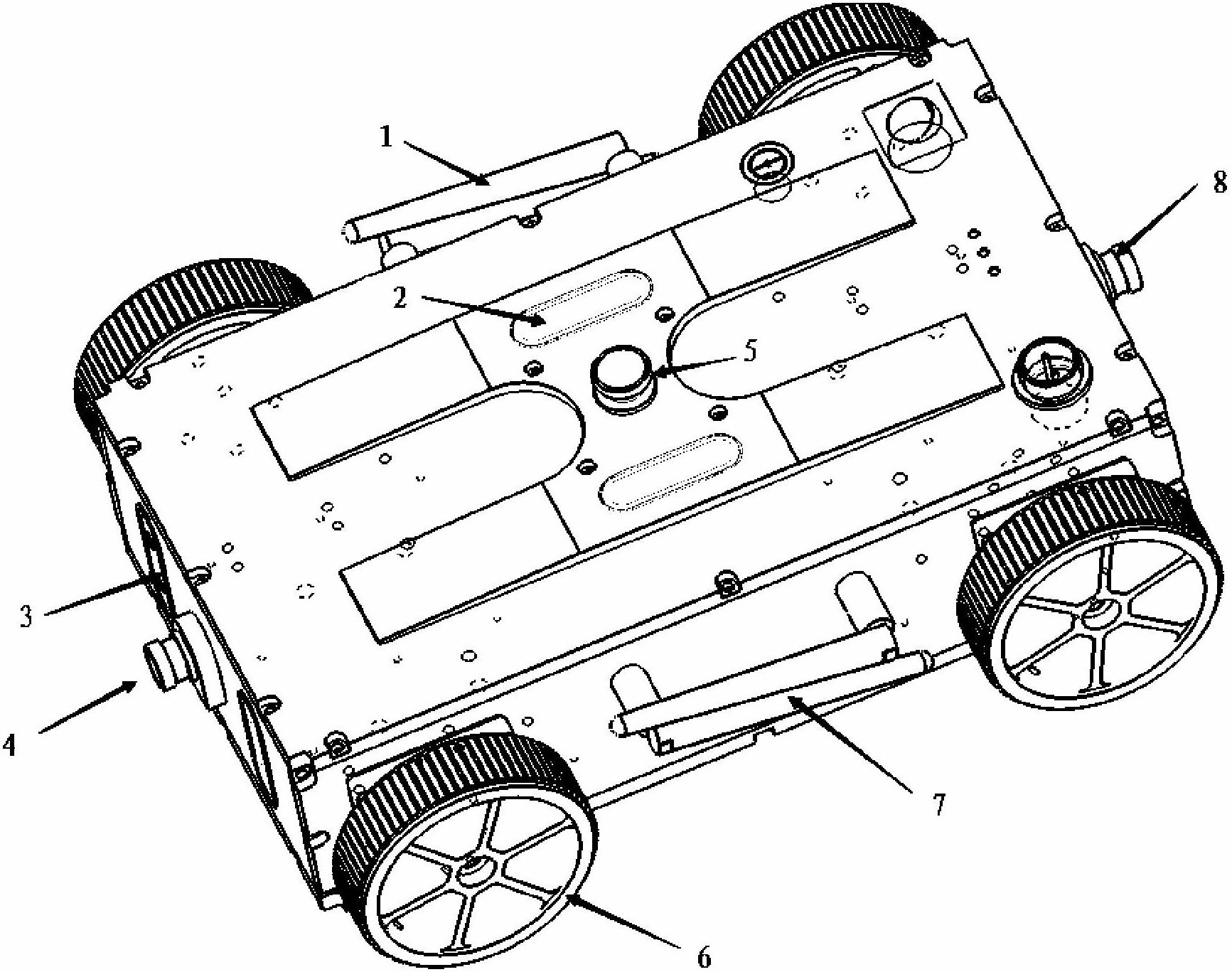
一种轮式磁吸附爬壁机器人,包括车体,所述车体采用铝合金制作成封闭性的腔体,内部装有控制系统、电源和行走驱动系统。根据本实用新型所述的轮式磁吸附爬壁机器人,可用于管道内部、船舶表面、大型钢构桥梁、石油天然气管道的探查,还可携带修复工具,针对缺陷进行修复。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有