

授权公布号:CN114089742B
基于路径曲率的AGV行驶车速控制方法、装置及介质
有效
申请
2021-10-25
申请公布
2022-02-25
授权
2023-09-26
预估到期
2041-10-25
| 申请号 | CN202111238394.0 |
| 申请日 | 2021-10-25 |
| 申请公布号 | CN114089742A |
| 申请公布日 | 2022-02-25 |
| 授权公布号 | CN114089742B |
| 授权公告日 | 2023-09-26 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区杏坛镇德进路2号 |
专利法律状态
2023-09-26
授权
状态信息
授权
2022-03-15
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20211025
2022-02-25
公布
状态信息
公布
摘要
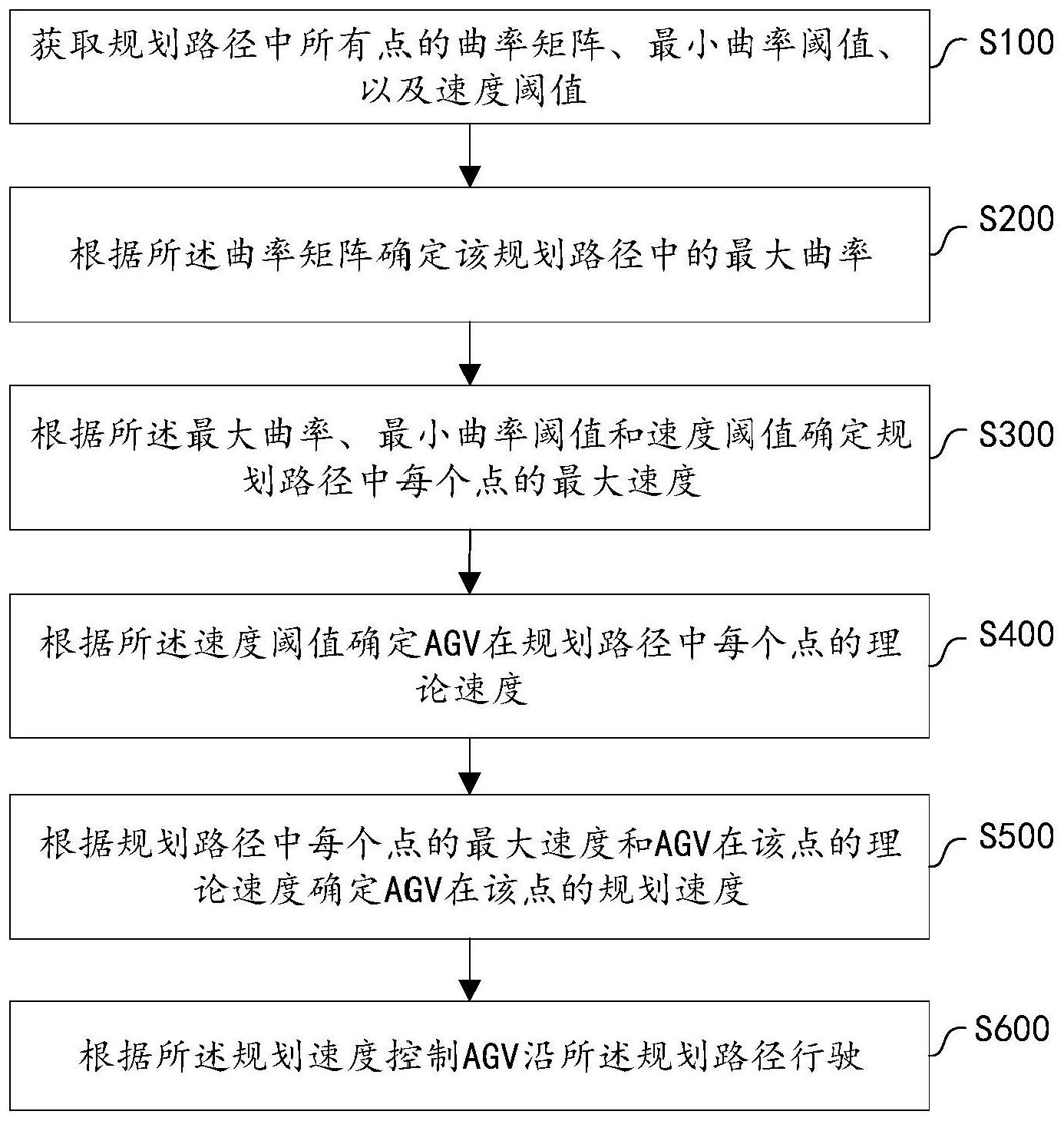
本公开提供了一种基于路径曲率的AGV行驶车速控制方法、装置及介质,涉及AGV控制技术领域,该方法包括获取规划路径中所有点的曲率矩阵、最小曲率阈值、以及速度阈值;根据所述曲率矩阵确定该规划路径中的最大曲率;根据所述最大曲率、最小曲率阈值和速度阈值确定规划路径中每个点的最大速度;其中,所述速度阈值包括最大速度阈值和最小速度阈值;其中,所述理论速度包括最大理论速度和最小理论速度;根据规划路径中每个点的最大速度和AGV在该点的理论速度确定AGV在该点的规划速度;根据所述规划速度控制AGV沿所述规划路径行驶;本公开能够保证对货物的平稳运输。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有