

授权公布号:CN114115281B
一种区域自动化交管控制方法
有效
申请
2021-11-30
申请公布
2022-03-01
授权
2024-03-26
预估到期
2041-11-30
| 申请号 | CN202111440752.6 |
| 申请日 | 2021-11-30 |
| 申请公布号 | CN114115281A |
| 申请公布日 | 2022-03-01 |
| 授权公布号 | CN114115281B |
| 授权公告日 | 2024-03-26 |
| 分类号 | G05D1/43;G05D1/633;G05D109/10N |
| 分类 | 控制;调节; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区杏坛镇德进路2号 |
专利法律状态
2024-03-26
授权
状态信息
授权
2022-03-01
公布
状态信息
公布
摘要
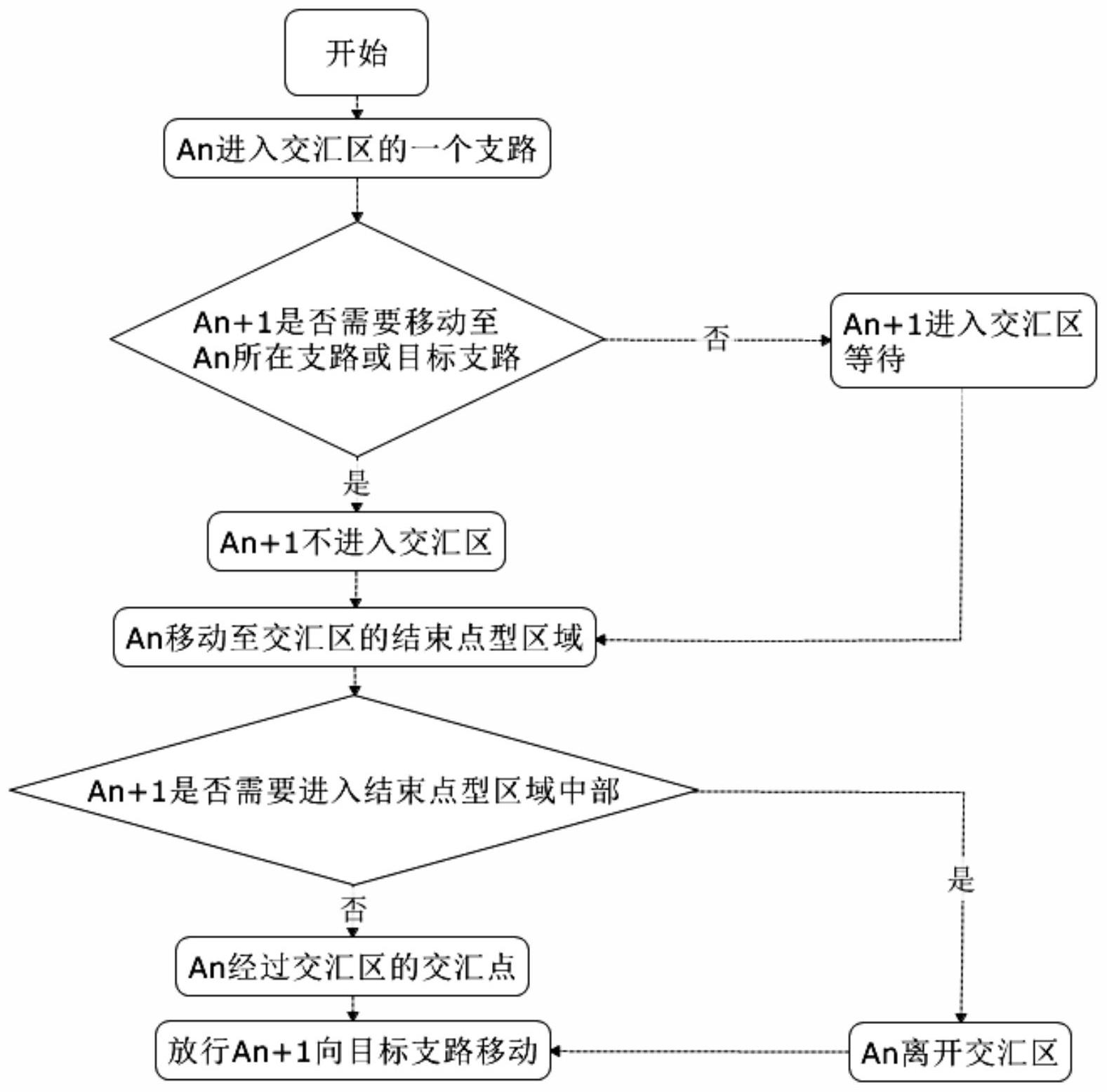
本发明提供一种区域自动化交管控制方法,包括以下步骤:机器人An进入交汇区的一个支路;机器人An移动至交汇区的结束点型区域;调度系统判断机器人An+1是否需要进入结束点型区域中部,若否,待机器人An经过交汇区的交汇点,放行机器人An+1向目标支路移动,否则,待机器人An离开交汇区,放行机器人An+1向目标支路移动。本发明的一种区域自动化交管控制方法,通过增加结束点型区域,避免交汇区内的移动机器人占用不会进入的支路,从而缩短与上述移动机器不共途径点的其他移动机器人的等待时间。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有