

授权公布号:CN108151766B
磁钉的定位方法、磁钉定位导航误差修正方法及定位装置
有效
申请
2017-12-27
申请公布
2018-06-12
授权
2024-03-01
预估到期
2037-12-27
| 申请号 | CN201711444342.2 |
| 申请日 | 2017-12-27 |
| 申请公布号 | CN108151766A |
| 申请公布日 | 2018-06-12 |
| 授权公布号 | CN108151766B |
| 授权公告日 | 2024-03-01 |
| 分类号 | G01C25/00 |
| 分类 | 测量;测试; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区大良街道办事处古鉴村委会展翔路1号 |
专利法律状态
2024-03-01
授权
状态信息
授权
2018-07-06
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C25/00;申请日:20171227
2018-06-12
公布
状态信息
公布
摘要
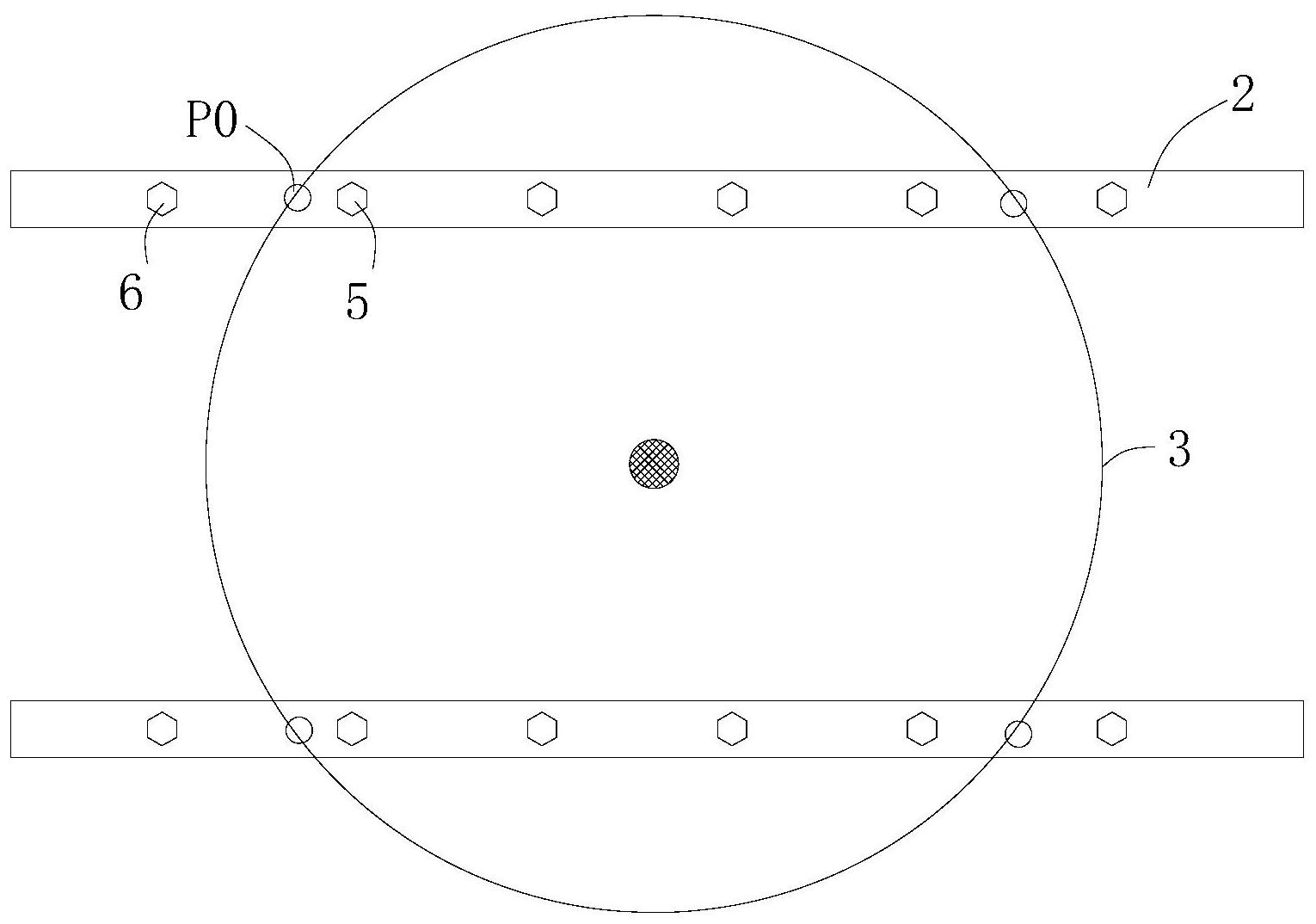
本发明属于物体定位方法领域,具体为一种磁钉的定位方法,包括以下步骤:(a)设置至少两组磁传感器,并且将所述两组磁传感器相隔一定距离的放置在磁钉所在区域上方;(b)根据所述两组磁传感器,采集磁场强度相同的测量点P0;(c)根据采集的所有的测量点P0,拟合出P0点的磁场强度分布曲线;(d)根据P0点分布曲线,推导出磁场强度最大的点Pmax,得到磁钉的位置。本发明可以在静止的情况下采集足够多的测量点P0,通过磁场强度相同的测量点P0,拟合出P0点分布曲线,推导出磁场强度最大的点Pmax,磁钉的位置为点Pmax的正下方。本发明与现有技术相比,具有定位准确、应用设备成本低以及定位结果实时反馈的优点。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有