

授权公布号:CN109941917B
AGV移动承载机构及AGV小车
有效
申请
2019-04-29
申请公布
2019-06-28
授权
2024-01-23
预估到期
2039-04-29
| 申请号 | CN201910357907.6 |
| 申请日 | 2019-04-29 |
| 申请公布号 | CN109941917A |
| 申请公布日 | 2019-06-28 |
| 授权公布号 | CN109941917B |
| 授权公告日 | 2024-01-23 |
| 分类号 | B66F7/10;B66F7/28 |
| 分类 | 卷扬;提升;牵引; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区杏坛镇德进路2号 |
专利法律状态
2024-01-23
授权
状态信息
授权
2019-07-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B66F7/10;申请日:20190429
2019-06-28
公布
状态信息
公布
摘要
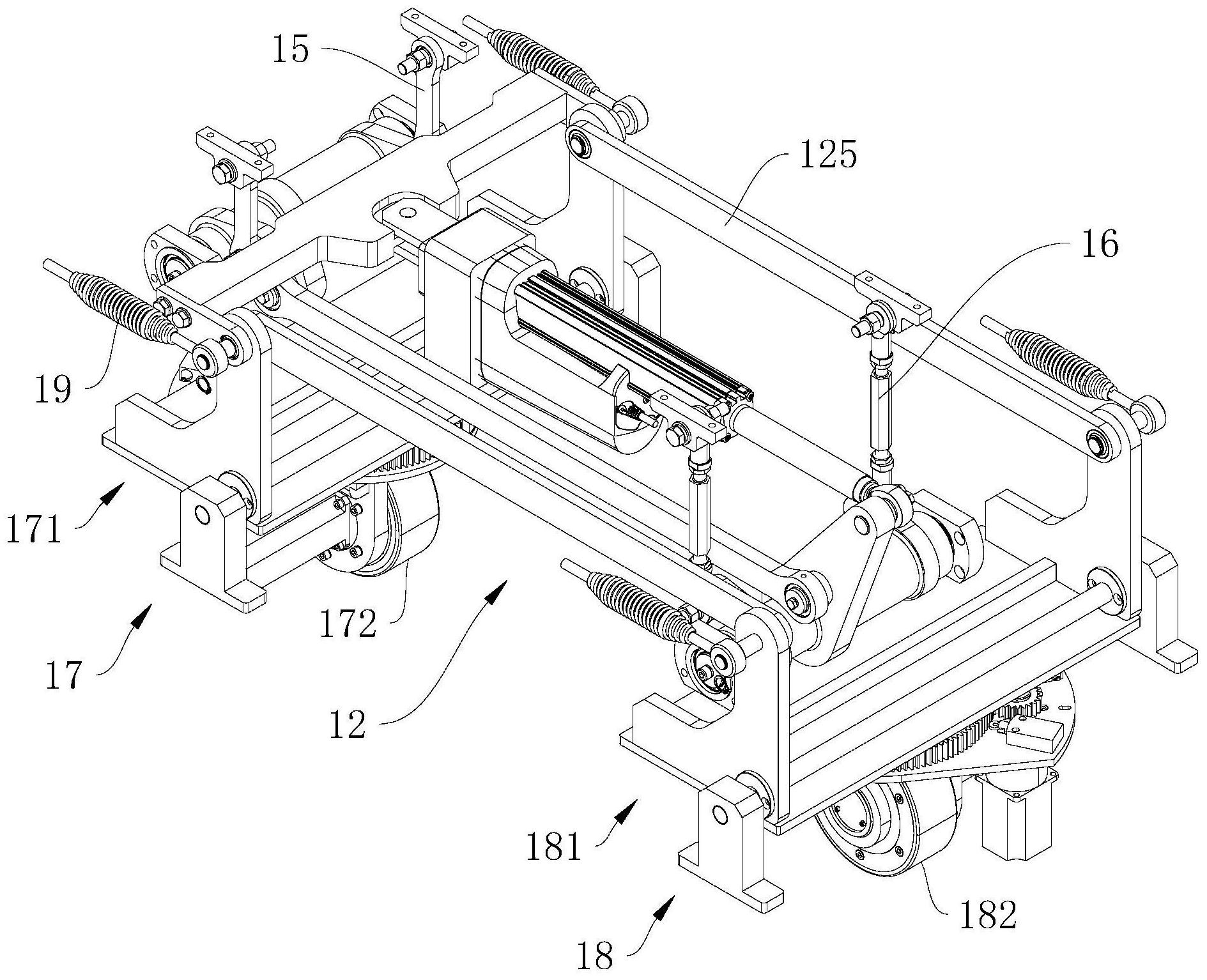
本发明公开了一种AGV移动承载机构及AGV小车,涉及AGV输送技术领域。该AGV移动承载机构,包括第一承载件、平衡传动组件、车架、第一驱动安装件、第一驱动轮以及随动轮;第一驱动轮和随动轮均设置于车架底部,且第一驱动轮安装于第一驱动安装件,第一驱动安装件转动连接于车架;第一承载件用于承载货物,且活动连接于车架,且通过平衡传动组件与第一驱动安装件连接,平衡传动组件用于在第一承载件承载货物时,具有带动第一驱动安装件转动的趋势,以增大第一驱动安装件压持于第一驱动轮的压持力。该AGV移动承载机构及AGV小车具有能够较均匀分配于驱动轮和随动轮的承载压力的特点。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有