

授权公布号:CN114499030B
AGV的驱动单元及AGV
有效
申请
2022-01-26
申请公布
2022-05-13
授权
2024-01-23
预估到期
2042-01-26
| 申请号 | CN202210092684.7 |
| 申请日 | 2022-01-26 |
| 申请公布号 | CN114499030A |
| 申请公布日 | 2022-05-13 |
| 授权公布号 | CN114499030B |
| 授权公告日 | 2024-01-23 |
| 分类号 | H02K7/00;H02K11/00;H02K11/21;B62D63/04 |
| 分类 | 发电、变电或配电; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区杏坛镇德进路2号 |
专利法律状态
2024-01-23
授权
状态信息
授权
2022-05-31
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):H02K7/00;申请日:20220126
2022-05-13
公布
状态信息
公布
摘要
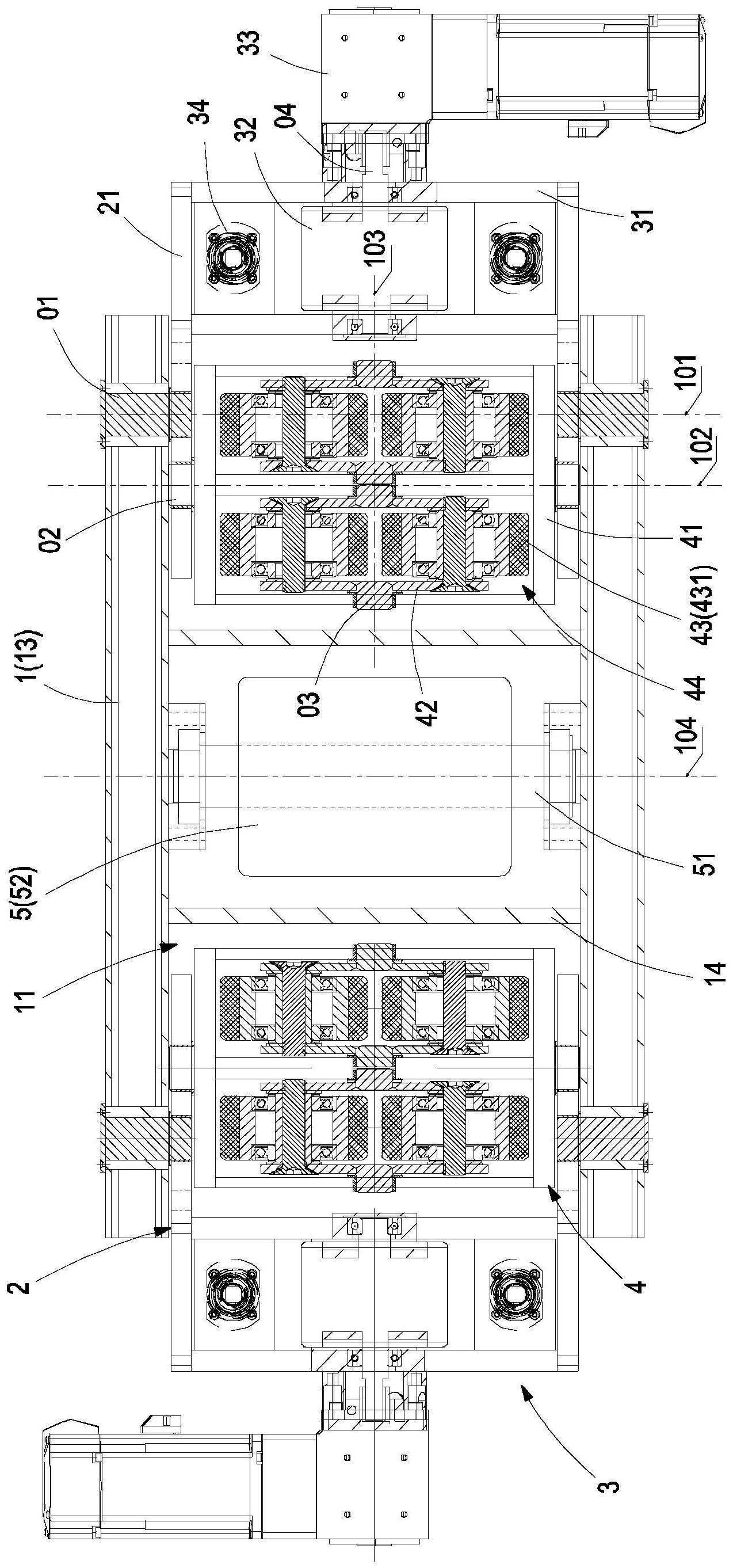
本发明属于自动导航搬运车技术领域,具体为AGV的驱动单元及AGV,本发明的AGV驱动单元设有位于主框架相对两侧的二级框架,二级框架与主框架转动连接,二级框架的相对两侧设有驱动轮组件和从动轮组件,在驱动轮组件与主框架之间增加从动轮组件,不仅可分担负载施加的下压力,对AGV车架提供有效的支撑,从而减少主动轮的负荷,延长其寿命,而且加入从动轮组件之后,主动轮到到驱动单元中心的力臂也相应增大,因此在此基础上可缩小主动轮的轮径及驱动单元的回转力矩,降低成本,并且尽可能地降低车架到底面的距离,使AGV重心更低,行驶更平稳,主框架、二级框架、三级框架之间构成的柔性框架可保证AGV避免承受太多的刚性冲击,也增加了驱动单元的寿命。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有