

授权公布号:CN111026124B
路口寻迹控制方法、装置、AGV小车和可读存储介质
有效
申请
2019-12-25
申请公布
2020-04-17
授权
2023-12-01
预估到期
2039-12-25
| 申请号 | CN201911359386.4 |
| 申请日 | 2019-12-25 |
| 申请公布号 | CN111026124A |
| 申请公布日 | 2020-04-17 |
| 授权公布号 | CN111026124B |
| 授权公告日 | 2023-12-01 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区杏坛镇德进路2号 |
专利法律状态
2023-12-01
授权
状态信息
授权
2020-05-12
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20191225
2020-04-17
公布
状态信息
公布
摘要
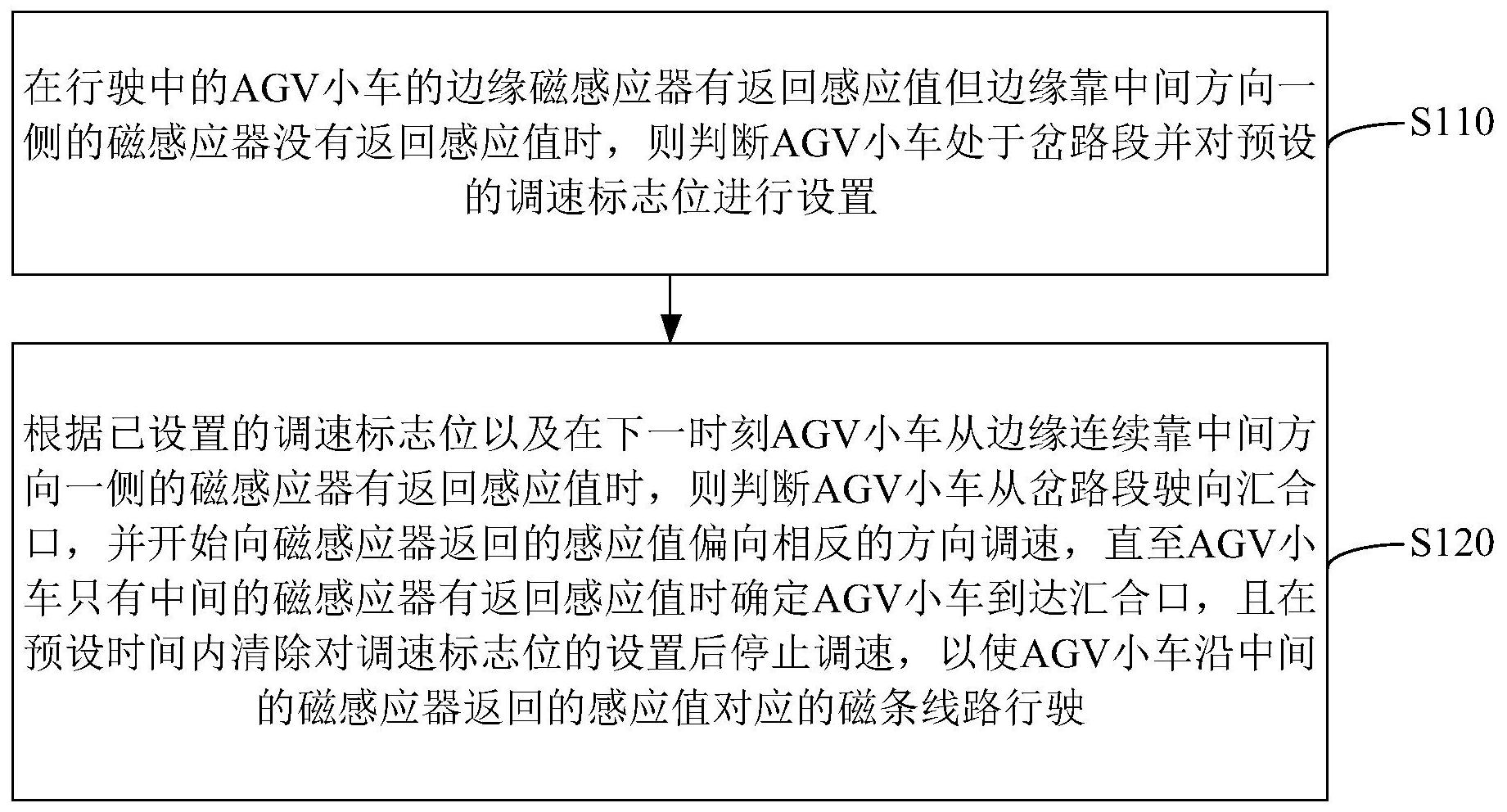
本发明实施例公开了路口寻迹控制方法、装置、AGV小车和可读存储介质,在行驶中的AGV小车的边缘磁感应器有返回感应值但边缘靠中间方向一侧的磁感应器没有返回感应值时,则判断AGV小车处于岔路段并对预设的调速标志位进行设置;根据已设置的调速标志位以及AGV小车从边缘连续靠中间方向一侧的磁感应器有返回感应值时,则判断AGV小车从岔路段驶向汇合口,并开始向磁感应器返回的感应值偏向相反的方向调速,直至AGV小车只有中间的磁感应器有返回感应值时确定AGV小车到达汇合口,且在预设时间内清除对调速标志位的设置后停止调速,以使AGV小车沿中间的磁感应器返回的感应值对应的磁条线路行驶。本发明可使小车平稳经过汇合口。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有