

授权公布号:CN114397892B
一种磁导航AGV协同绕行方法
有效
申请
2021-12-27
申请公布
2022-04-26
授权
2023-09-26
预估到期
2041-12-27
| 申请号 | CN202111614645.0 |
| 申请日 | 2021-12-27 |
| 申请公布号 | CN114397892A |
| 申请公布日 | 2022-04-26 |
| 授权公布号 | CN114397892B |
| 授权公告日 | 2023-09-26 |
| 分类号 | G05D1/02 |
| 分类 | 控制;调节; |
| 申请人名称 | 广东嘉腾机器人自动化有限公司 |
| 申请人地址 | 广东省佛山市顺德区杏坛镇德进路2号 |
专利法律状态
2023-09-26
授权
状态信息
授权
2022-05-13
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20211227
2022-04-26
公布
状态信息
公布
摘要
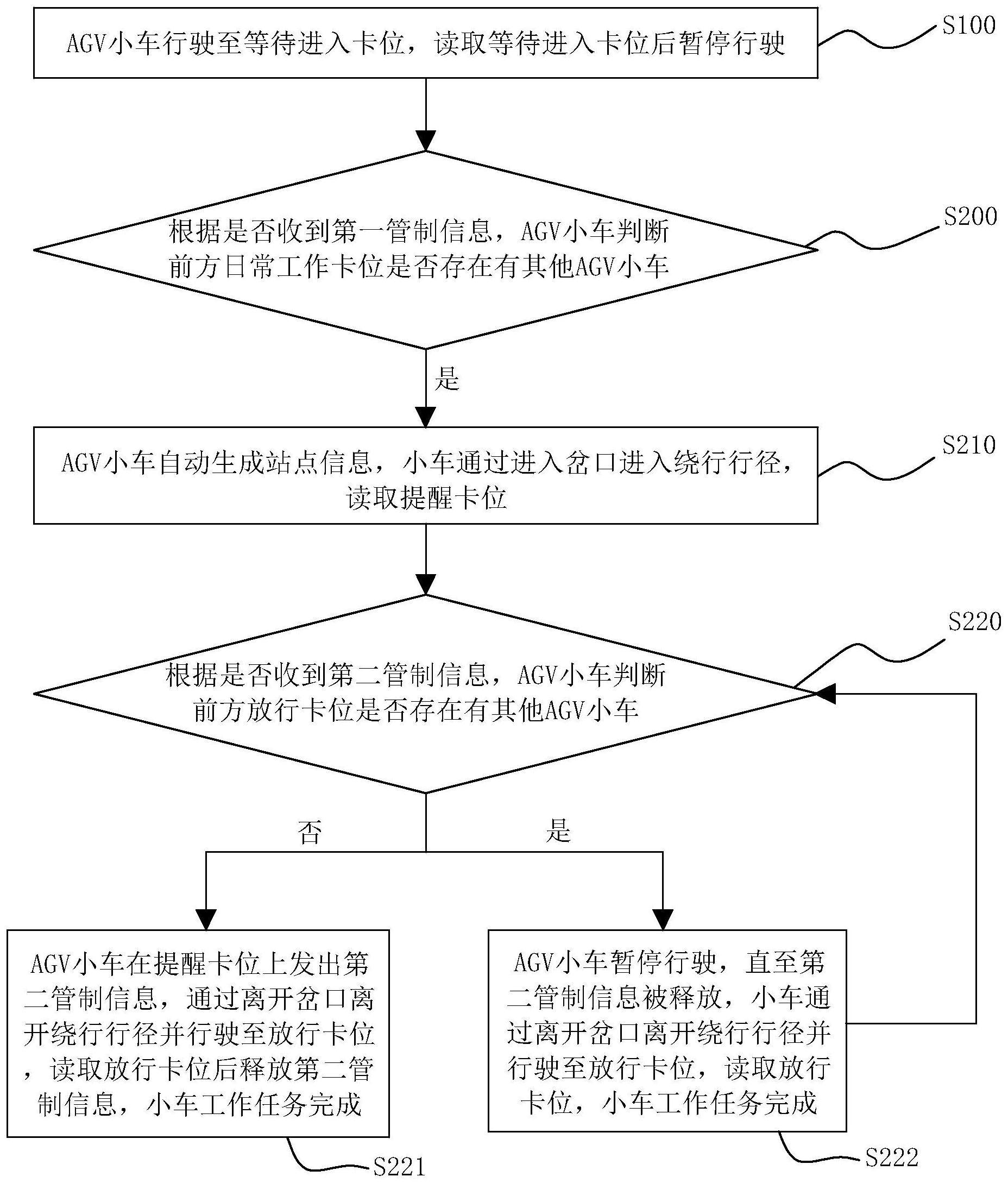
本发明公开了一种磁导航AGV协同绕行方法,该方法包括:AGV运行空间包括直行行径和绕行行径,设置五个读卡卡位和一条绕行磁条支路;AGV小车在直行行径上行驶,小车读取等待进入卡位后暂停行驶;根据是否收到第一管制信息,小车判断前方日常工作卡位是否存在有其他小车,如果是,则小车自动生成站点信息,在遇到岔路时右拐弯进入绕行行径后读取提醒卡位;根据是否收到第二管制信息,小车判断前方放行卡位是否存在有其他小车,如果否,则小车在提醒卡位发出第二管制信息,向前行驶至放行卡位并读取,释放第二管制信息。本方法铺设新的绕行磁条和设计前后车协同调度的道路规划,有效地避免了运输时AGV小车堵塞情形的发生,提高了生产效率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有