

授权公布号:CN112720457B
机器人标定方法、装置、电子设备及存储介质
有效
申请
2020-12-03
申请公布
2021-04-30
授权
2022-03-18
预估到期
2040-12-03
| 申请号 | CN202011396628.X |
| 申请日 | 2020-12-03 |
| 申请公布号 | CN112720457A |
| 申请公布日 | 2021-04-30 |
| 授权公布号 | CN112720457B |
| 授权公告日 | 2022-03-18 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳众为兴技术股份有限公司 |
| 申请人地址 | 广东省深圳市南山区艺园路马家龙田厦产业园(原27栋-29栋)5-001室 |
专利法律状态
2022-03-18
授权
状态信息
授权
2021-09-07
著录事项变更
状态信息
著录事项变更IPC(主分类):B25J9/16变更前 发明人:郭晓彬 发明人:黄国辉 发明人:迟杰恒 发明人:罗奇 发明人:石廷亮 发明人:罗欣 发明人:黄均标 发明人:陈艳变更后 发明人:郭晓彬 发明人:徐建生 发明人:黄国辉 发明人:迟杰恒 发明人:罗奇 发明人:石廷亮 发明人:罗欣 发明人:黄均标 发明人:陈艳
2021-05-21
实质审查的生效
状态信息
实质审查的生效IPC(主分类):B25J9/16
2021-04-30
公布
状态信息
公布
摘要
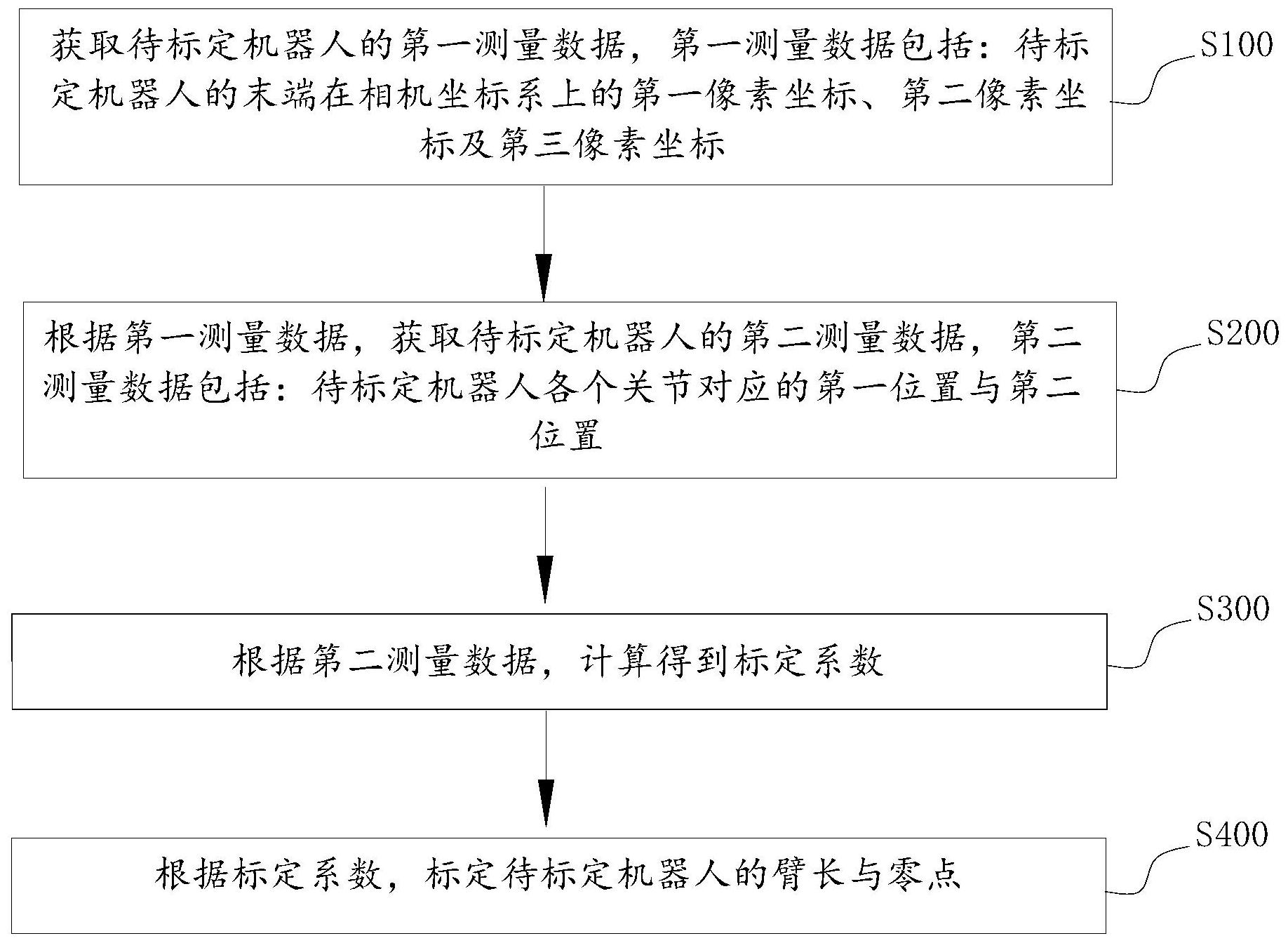
本申请公开了一种机器人标定方法、装置、电子设备及存储介质。本申请的机器人标定方法包括:获取待标定机器人的第一测量数据,第一测量数据包括:待标定机器人的末端在相机坐标系上的第一像素坐标、第二像素坐标及第三像素坐标。根据第一测量数据,获取待标定机器人的第二测量数据,第二测量数据包括:待标定机器人各个关节对应的第一位置与第二位置。根据第二测量数据,计算得到标定系数。根据标定系数,标定待标定机器人的臂长与零点。本申请的机器人标定方法能够减少人为误差,提高机器人绝对定位精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有