

授权公布号:CN112621711B
机器人及其相机固定于机架的手眼标定方法以及存储介质
有效
申请
2020-11-19
申请公布
2021-04-09
授权
2022-11-29
预估到期
2040-11-19
| 申请号 | CN202011304115.1 |
| 申请日 | 2020-11-19 |
| 申请公布号 | CN112621711A |
| 申请公布日 | 2021-04-09 |
| 授权公布号 | CN112621711B |
| 授权公告日 | 2022-11-29 |
| 分类号 | B25J9/00;B25J9/16;B25J13/08;B25J18/00;B25J19/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳众为兴技术股份有限公司 |
| 申请人地址 | 广东省深圳市南山区艺园路马家龙田厦产业园(原27栋-29栋)5-001室 |
专利法律状态
2022-11-29
授权
状态信息
授权
2021-04-09
公布
状态信息
公布
摘要
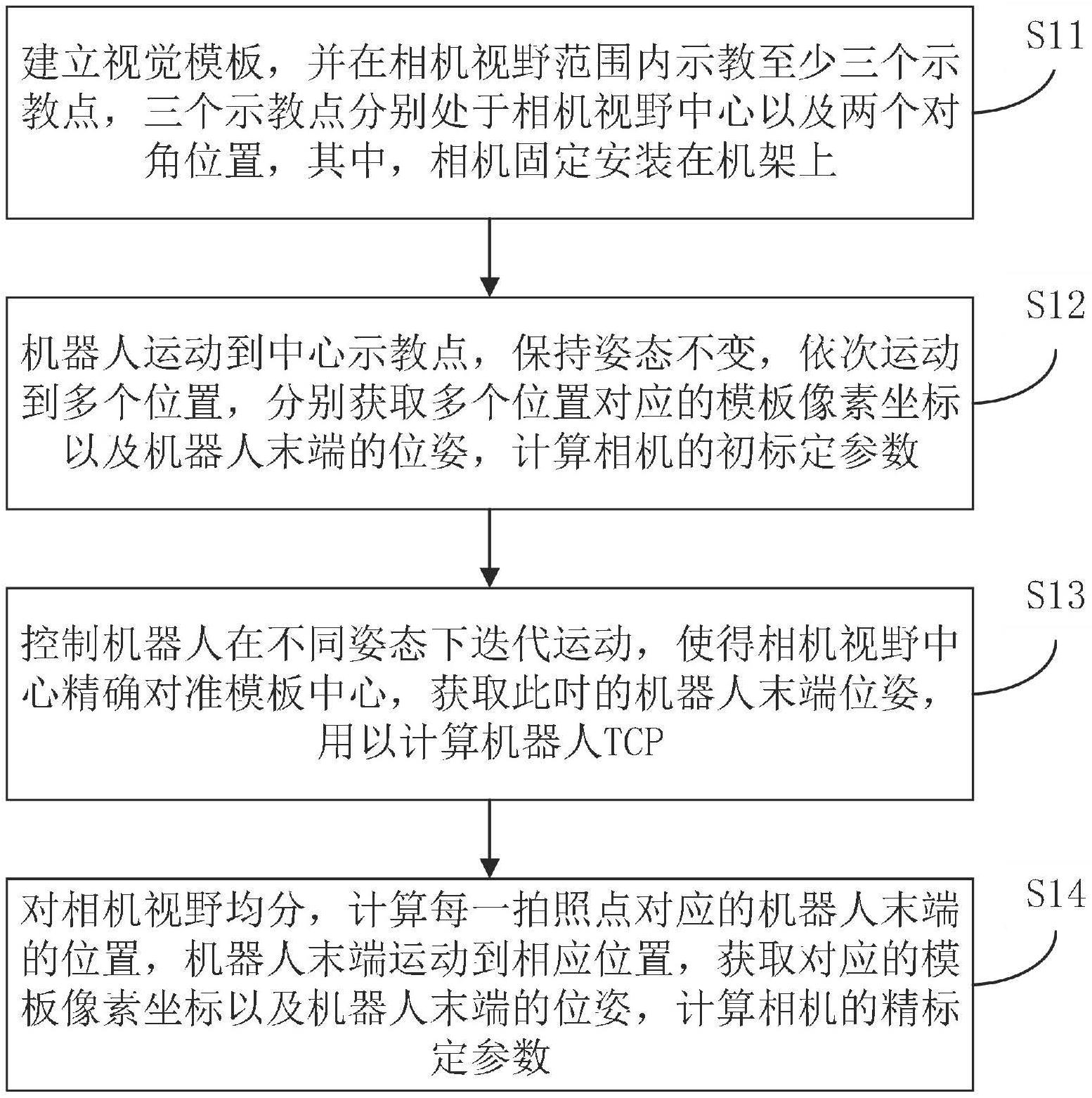
本发明公开了一种机器人及其相机固定于机架的手眼标定方法以及存储介质,该机器人手眼标定方法包括:建立视觉模板,并在相机视野范围内示教至少三个示教点,三个示教点分别处于相机视野中心和两个对角位置;机器人运动到中心示教点,保持姿态不变,依次运动到多个位置,获取模板像素坐标以及机器人末端的位姿,计算相机的初标定参数;控制机器人在不同姿态下迭代运动,使得相机中心精确对准模板中心,获取机器人末端位姿,计算机器人TCP;对相机视野均分,计算每一拍照点对应的机器人末端位置,机器人运动到相应位置,获取模板像素坐标以及机器人末端位姿,计算相机的精标定参数。上述方案,能够提高手眼标定方法的标定精度以及简化标定操作步骤。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有