

授权公布号:CN112720455B
最优关节加速度与减速度计算方法、装置及其应用
有效
申请
2020-12-01
申请公布
2021-04-30
授权
2022-05-10
预估到期
2040-12-01
| 申请号 | CN202011378424.3 |
| 申请日 | 2020-12-01 |
| 申请公布号 | CN112720455A |
| 申请公布日 | 2021-04-30 |
| 授权公布号 | CN112720455B |
| 授权公告日 | 2022-05-10 |
| 分类号 | B25J9/16;G06F30/20;G06F119/14N;G06F111/04N |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳众为兴技术股份有限公司 |
| 申请人地址 | 广东省深圳市南山区艺园路马家龙田厦产业园(原27栋-29栋)5-001室 |
专利法律状态
2022-05-10
授权
状态信息
授权
2021-04-30
公布
状态信息
公布
摘要
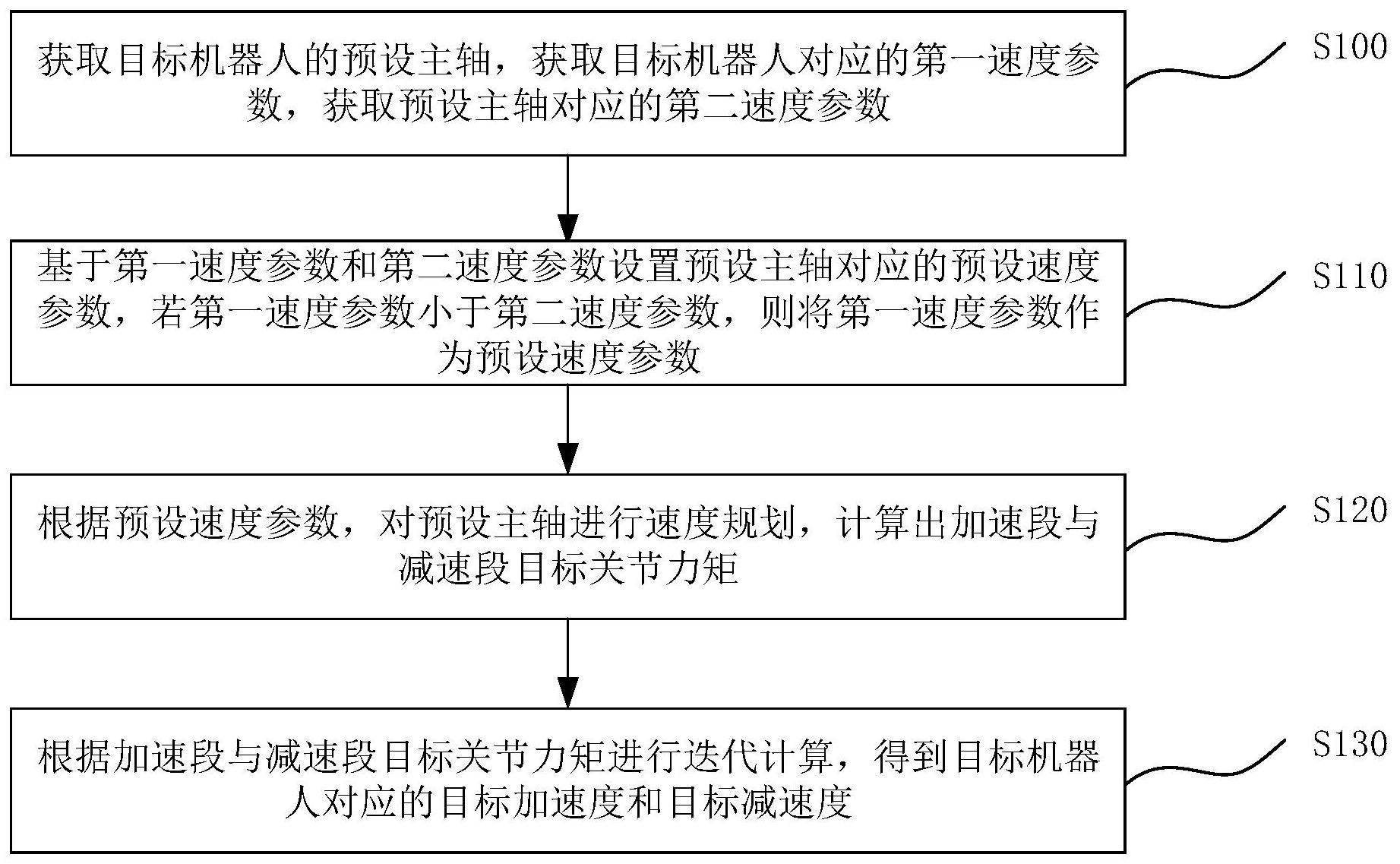
本发明公开了一种最优关节加速度与减速度计算方法、装置及其应用,涉及机器人控制领域,其中最优关节加速度与减速度计算方法包括:获取目标机器人的预设主轴,获取目标机器人对应的第一速度参数,获取预设主轴对应的第二速度参数;基于所述第一速度参数和所述第二速度参数设置所述预设主轴对应的预设速度参数;根据预设速度参数,对预设主轴进行速度规划,计算出加速段与减速段目标关节力矩;根据加速段与减速段目标关节力矩进行迭代计算,得到目标机器人对应的目标加速度和目标减速度。通过上述方法,能够在满足机器人关节的相关速度参数的约束下,自动且快速地计算最优的关节加速度与减速度,充分发挥电机的性能,提高机器人节拍。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有