

授权公布号:CN113716130B
手套装盒系统
有效
申请
2021-09-07
申请公布
2021-09-07
授权
2022-09-30
预估到期
2041-09-07
| 申请号 | CN202111044642.8 |
| 申请日 | 2021-09-07 |
| 申请公布号 | CN113716130A |
| 申请公布日 | 2021-09-07 |
| 授权公布号 | CN113716130B |
| 授权公告日 | 2022-09-30 |
| 分类号 | B65B43/16;B65B7/20 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 苏州澳昆智能机器人技术有限公司 |
| 申请人地址 | 江苏省苏州市昆山市周市镇杜家路368号 |
专利法律状态
2022-09-30
授权
状态信息
授权
2021-12-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B65B 43/16;专利申请号:2021110446428;申请日:20210907
2021-11-30
公布
状态信息
公布
2021-09-07
公布
状态信息
公布
摘要
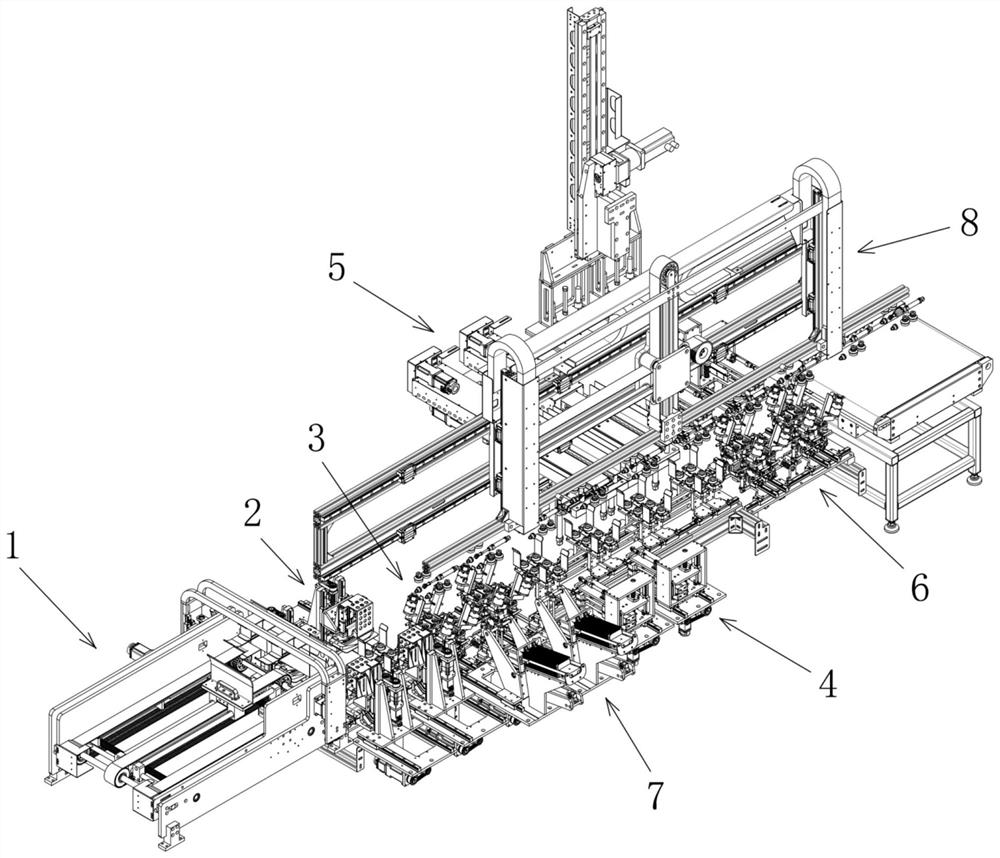
本发明涉及一种手套装盒系统,包括沿着一个方向依次排布的:进料单元、多个用于对包装盒上相对的两侧面的第一封装体进行预折的第一预折单元、多个用于对包装盒上第一侧面的第二封装体进行封装的第一封装单元、多个用于对包装盒上所述第一侧面的第一封装体进行封装的第二封装单元、多个手套投料单元和多个用于对包装盒上与所述第一侧面相对的第二侧面上的第一封装体和第二封装体进行封装的第三封装单元;以及,多个与各所述第一封装单元对应设置,从所述第一侧面向处于所述第一封装单元处的包装盒内投送手套合格证的送料单元;以及,位于上述各单元上方,用于同时拾取运输多个包装盒的拾取运输单元。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有