

授权公布号:CN110909438B
一种基于动力学模型的轻载关节型并联机器人控制方法
有效
申请
2018-09-14
申请公布
2020-03-24
授权
2023-06-06
预估到期
2038-09-14
| 申请号 | CN201811074443.X |
| 申请日 | 2018-09-14 |
| 申请公布号 | CN110909438A |
| 申请公布日 | 2020-03-24 |
| 授权公布号 | CN110909438B |
| 授权公告日 | 2023-06-06 |
| 分类号 | G06F30/20;G06F119/14N;B25J9/16N |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 上海沃迪智能装备股份有限公司 |
| 申请人地址 | 上海市金山区亭卫公路5899号 |
专利法律状态
2023-06-06
授权
状态信息
授权
2020-04-17
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06F30/20;申请日:20180914
2020-03-24
公布
状态信息
公布
摘要
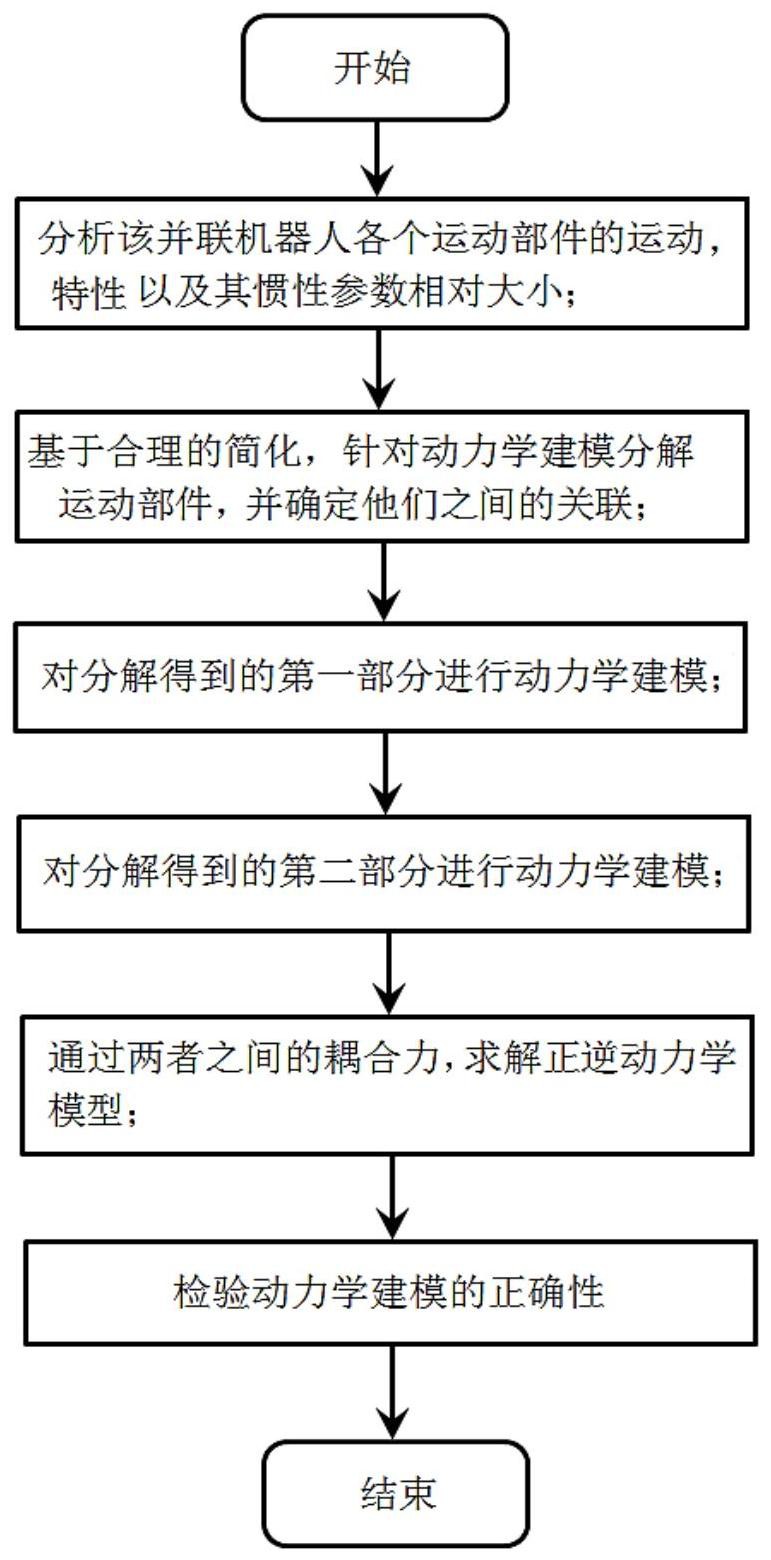
本发明涉及一种基于动力学模型的轻载关节型并联机器人控制方法,包括步骤:1)结合轻载关节型并联机器人的整体结构特点、运动特性、受力特性及惯量属性,选择被简化的运动部件,通过简化其动力学模型将机器人的动力学分析简化为分别对机器人两部分运动部件的动力学分析;2)获取第一部分、第二部分中各个运动部件的动力学特性,并确定二者之间的动力学关联;3)对第一部分、第二部分分别建立动力学模型;4)根据两部分之间的动力学耦合关系,求得机器人整体动力学模型。与现有技术相比,本发明适用于与本并联机器结构相似,动力学分布特点相似的并联机器人的动力学建模,建模思路清晰,计算量适中,实施容易,使用便利。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有