

授权公布号:CN111240469B
手部动作捕捉的校准方法、装置、电子设备及存储介质
有效
申请
2019-12-31
申请公布
2020-06-05
授权
2023-04-25
预估到期
2039-12-31
| 申请号 | CN201911415837.1 |
| 申请日 | 2019-12-31 |
| 申请公布号 | CN111240469A |
| 申请公布日 | 2020-06-05 |
| 授权公布号 | CN111240469B |
| 授权公告日 | 2023-04-25 |
| 分类号 | G06F3/01;G06T7/70;G06T17/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京诺亦腾科技有限公司 |
| 申请人地址 | 北京市西城区新街口外大街28号A座502号 |
专利法律状态
2023-04-25
授权
状态信息
授权
2020-06-05
公布
状态信息
公布
摘要
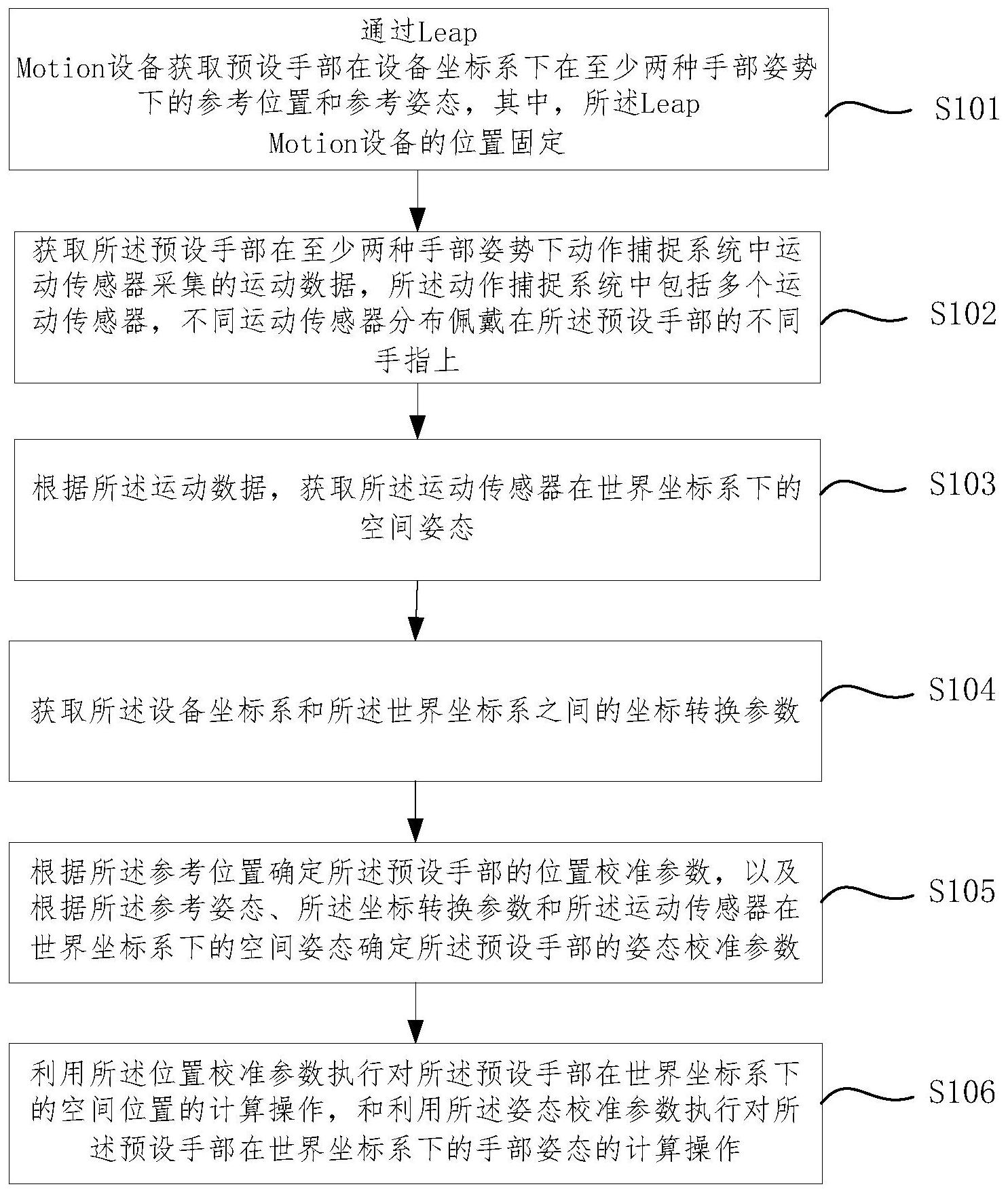
本申请涉及一种手部动作捕捉的校准方法、装置、电子设备及存储介质,该方法包括:通过位置固定的Leap Motion设备获取预设手部在设备坐标系下在至少两种手部姿势下的参考位置和参考姿态;获取预设手部在至少两种手部姿势下运动传感器采集的运动数据;根据运动数据获取运动传感器在世界坐标系下的空间姿态;确定设备坐标系和世界坐标系之间的坐标转换参数;根据参考位置、参考姿态、坐标转换参数和运动传感器在世界坐标系下的空间姿态确定预设手部的位置校准参数和姿态校准参数;利用位置校准参数和姿态校准参数执行对预设手部在世界坐标系下的手部位置和姿态的计算操作。本申请实施例利用Leap Motion设备在可视范围内,无遮挡的情况下,提高了手部位置和姿态的测量与校准精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有