

授权公布号:CN116342662B
基于多目相机的追踪定位方法、装置、设备及介质
有效
申请
2023-03-29
申请公布
2023-06-27
授权
2023-12-05
预估到期
2043-03-29
| 申请号 | CN202310323947.5 |
| 申请日 | 2023-03-29 |
| 申请公布号 | CN116342662A |
| 申请公布日 | 2023-06-27 |
| 授权公布号 | CN116342662B |
| 授权公告日 | 2023-12-05 |
| 分类号 | G06T7/292;G06T7/246;G06T7/73 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京诺亦腾科技有限公司 |
| 申请人地址 | 北京市西城区新街口外大街28号A座502号 |
专利法律状态
2023-12-05
授权
状态信息
授权
2023-07-14
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G06T7/292;申请日:20230329
2023-06-27
公布
状态信息
公布
摘要
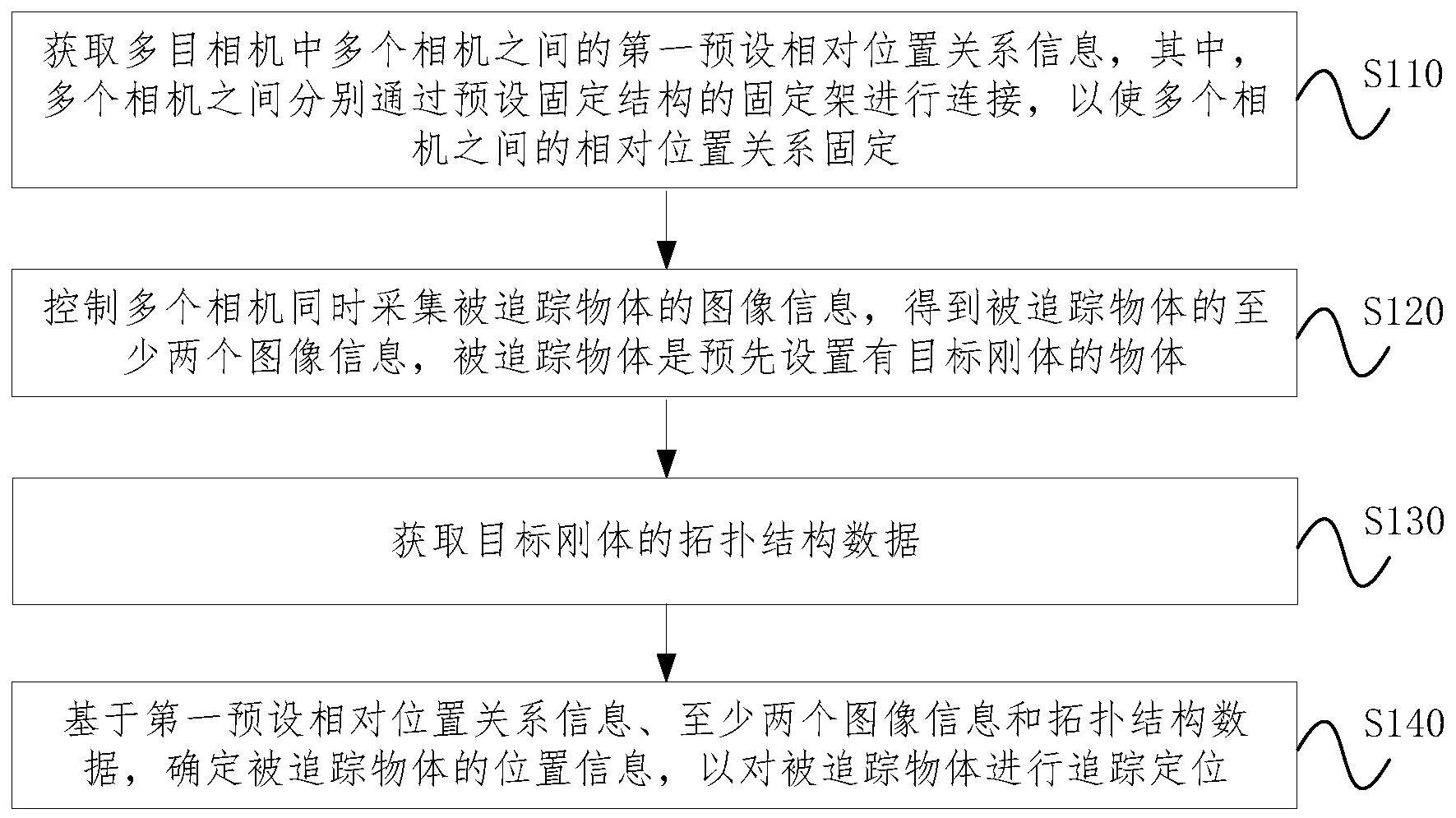
本公开涉及一种基于多目相机的追踪定位方法、装置、设备及介质。其中,基于多目相机的追踪定位方法包括:获取多目相机中多个相机之间的第一预设相对位置关系信息,其中,多个相机之间分别通过预设固定结构的固定架进行连接,以使多个相机之间的相对位置关系固定;控制多个相机同时采集被追踪物体的图像信息,得到被追踪物体的至少两个图像信息,被追踪物体是预先设置有目标刚体的物体;获取目标刚体的拓扑结构数据;基于第一预设相对位置关系信息、至少两个图像信息和拓扑结构数据,确定被追踪物体的位置信息,由此,实现基于多目相机进行追踪定位时的免扫场,且无需每次对多目相机中的多个相机进行重新安装,同时降低了安装和维护成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有