

授权公布号:CN111240468B
手部动作捕捉的校准方法、装置、电子设备及存储介质
有效
申请
2019-12-31
申请公布
2020-06-05
授权
2023-04-25
预估到期
2039-12-31
| 申请号 | CN201911415808.5 |
| 申请日 | 2019-12-31 |
| 申请公布号 | CN111240468A |
| 申请公布日 | 2020-06-05 |
| 授权公布号 | CN111240468B |
| 授权公告日 | 2023-04-25 |
| 分类号 | G06F3/01;G06T7/70;G06T17/00 |
| 分类 | 计算;推算;计数; |
| 申请人名称 | 北京诺亦腾科技有限公司 |
| 申请人地址 | 北京市西城区新街口外大街28号A座502号 |
专利法律状态
2023-04-25
授权
状态信息
授权
2020-06-05
公布
状态信息
公布
摘要
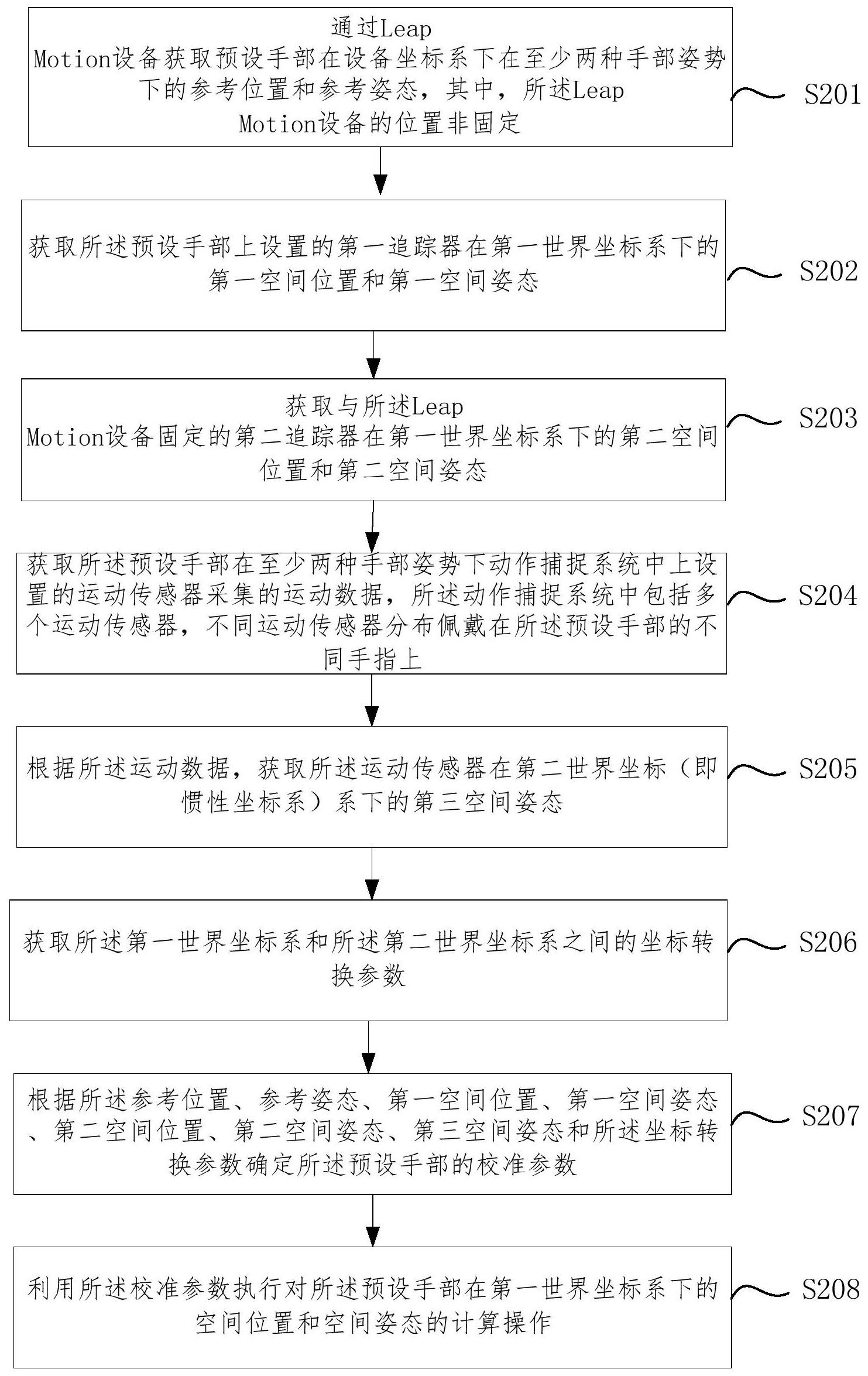
本申请涉及一种手部动作捕捉的校准方法、装置及计算机存储介质,该方法包括:通过位置非固定的Leap Motion设备获取预设手部在设备坐标系下的参考位置和姿态;获取第一追踪器在第一世界坐标系下的第一空间位置和姿态;获取第二追踪器在第一世界坐标系下的第二空间位置和姿态;根据运动数据获取运动传感器在第二世界坐标系下的第三空间姿态;获取第一、第二世界坐标系的坐标转换参数;根据参考位置和姿态、第一和第二空间位置、第一和第二以及第三空间姿态和坐标转换参数确定校准参数;利用校准参数执行对预设手部的空间位置和姿态的计算操作。本申请利用Leap Motion设备和两个追踪器提高了手部位置和姿态的测量与校准精度。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有