

授权公布号:CN109664317B
机器人的物体抓取系统及方法
有效
申请
2019-01-24
申请公布
2019-04-23
授权
2022-06-14
预估到期
2039-01-24
| 申请号 | CN201910069683.9 |
| 申请日 | 2019-01-24 |
| 申请公布号 | CN109664317A |
| 申请公布日 | 2019-04-23 |
| 授权公布号 | CN109664317B |
| 授权公告日 | 2022-06-14 |
| 分类号 | B25J13/08;B25J19/04;B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 深圳勇艺达机器人有限公司 |
| 申请人地址 | 广东省深圳市宝安区航城街道固戍开发区泰华梧桐工业园2A号建筑4层、2B号建筑4层 |
专利法律状态
2022-06-14
授权
状态信息
授权
2019-04-23
公布
状态信息
公布
摘要
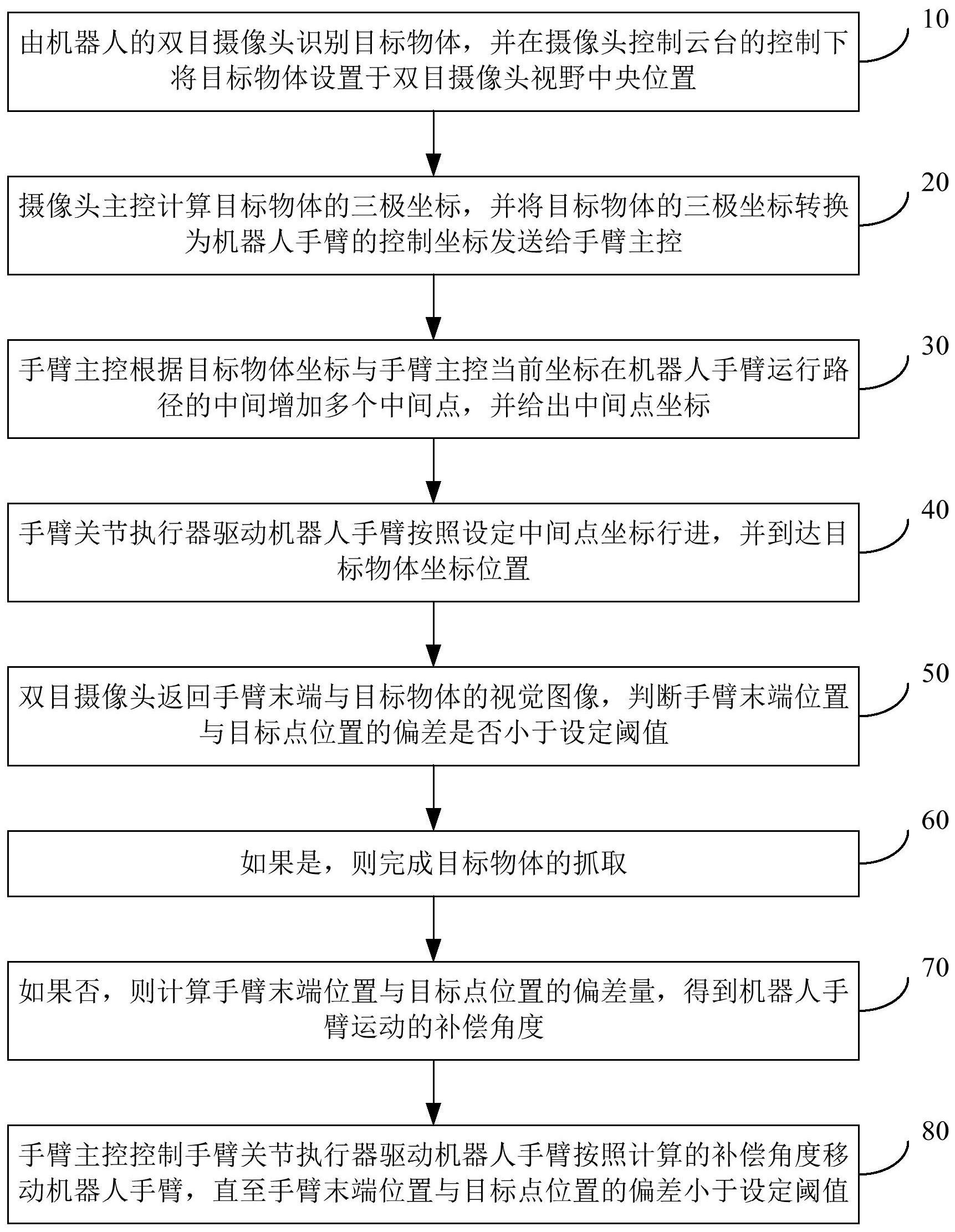
本发明公开了一种机器人的物体抓取系统及方法,所述方法包括:由机器人的双目摄像头识别目标物体,并将目标物体设置于双目摄像头视野中央位置;计算目标物体的三极坐标,并将三极坐标转换为机器人手臂的控制坐标;手臂主控在机器人手臂运行路径的中间增加多个中间点,并给出中间点坐标;手臂关节执行器驱动机器人手臂按照设定中间点坐标行进,并到达目标物体坐标位置;控制机器人手臂按照计算的补偿角度移动机器人手臂,直至手臂末端位置与目标点位置的偏差小于设定阈值。本发明的机器人手臂不需要配备高精度电机等部件,动作没有限制冗余自由度,两个摄像头可以自由转动并时刻追踪目标物体,这样使机器人看起来更加拟人化。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有