

授权公布号:CN106743541B
一种搬运方法及搬运设备
有效
申请
2016-11-17
申请公布
2017-05-31
授权
2022-11-04
预估到期
2036-11-17
| 申请号 | CN201611033503.4 |
| 申请日 | 2016-11-17 |
| 申请公布号 | CN106743541A |
| 申请公布日 | 2017-05-31 |
| 授权公布号 | CN106743541B |
| 授权公告日 | 2022-11-04 |
| 分类号 | B08B11/04 |
| 分类 | 清洁; |
| 申请人名称 | 浙江国自机器人技术股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区东信大道66号4幢5层501-516、518室 |
专利法律状态
2022-11-04
授权
状态信息
授权
2017-05-31
公布
状态信息
公布
摘要
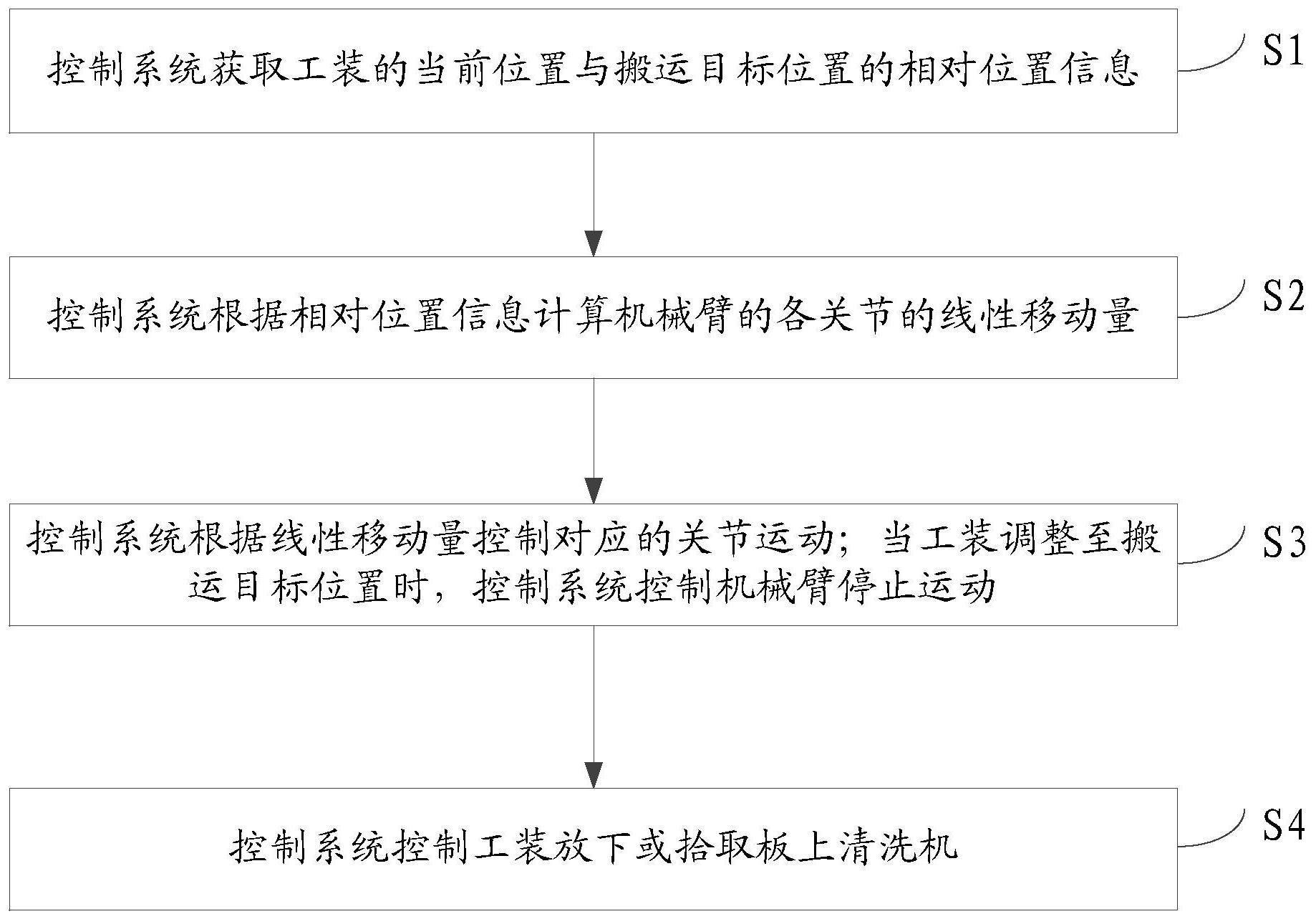
本发明公开了一种搬运方法,包括:控制系统获取工装的当前位置与搬运目标位置的相对位置信息;控制系统根据相对位置信息计算机械臂的各关节的线性移动量;控制系统根据线性移动量控制对应的关节运动;当工装调整至搬运目标位置时,控制系统控制机械臂停止运动;控制系统控制工装放置或拾取板上清洗机。本发明通过机械臂结构来调整板上清洗机的姿态,是解决板上清洗机搬运的关键步骤之一,本发明的技术方案提高了设备的自动化水平,降低了人工操作难度,提高了调整板上清洗机的就位精度,能够防止板上清洗机损坏光伏板,提高了清洗机器人的可靠性。本发明还公开了一种搬运设备。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有