

授权公布号:CN112256036B
一种底盘运行控制方法、系统、装置和AGV小车
有效
申请
2020-11-03
申请公布
2021-01-22
授权
2024-02-06
预估到期
2040-11-03
| 申请号 | CN202011209693.7 |
| 申请日 | 2020-11-03 |
| 申请公布号 | CN112256036A |
| 申请公布日 | 2021-01-22 |
| 授权公布号 | CN112256036B |
| 授权公告日 | 2024-02-06 |
| 分类号 | G05D1/43;G05D1/65;G05D1/644;G05D109/10N |
| 分类 | 控制;调节; |
| 申请人名称 | 浙江国自机器人技术股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区东信大道66号4幢5层501-516、518室 |
专利法律状态
2024-02-06
授权
状态信息
授权
2021-02-09
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20201103
2021-01-22
公布
状态信息
公布
摘要
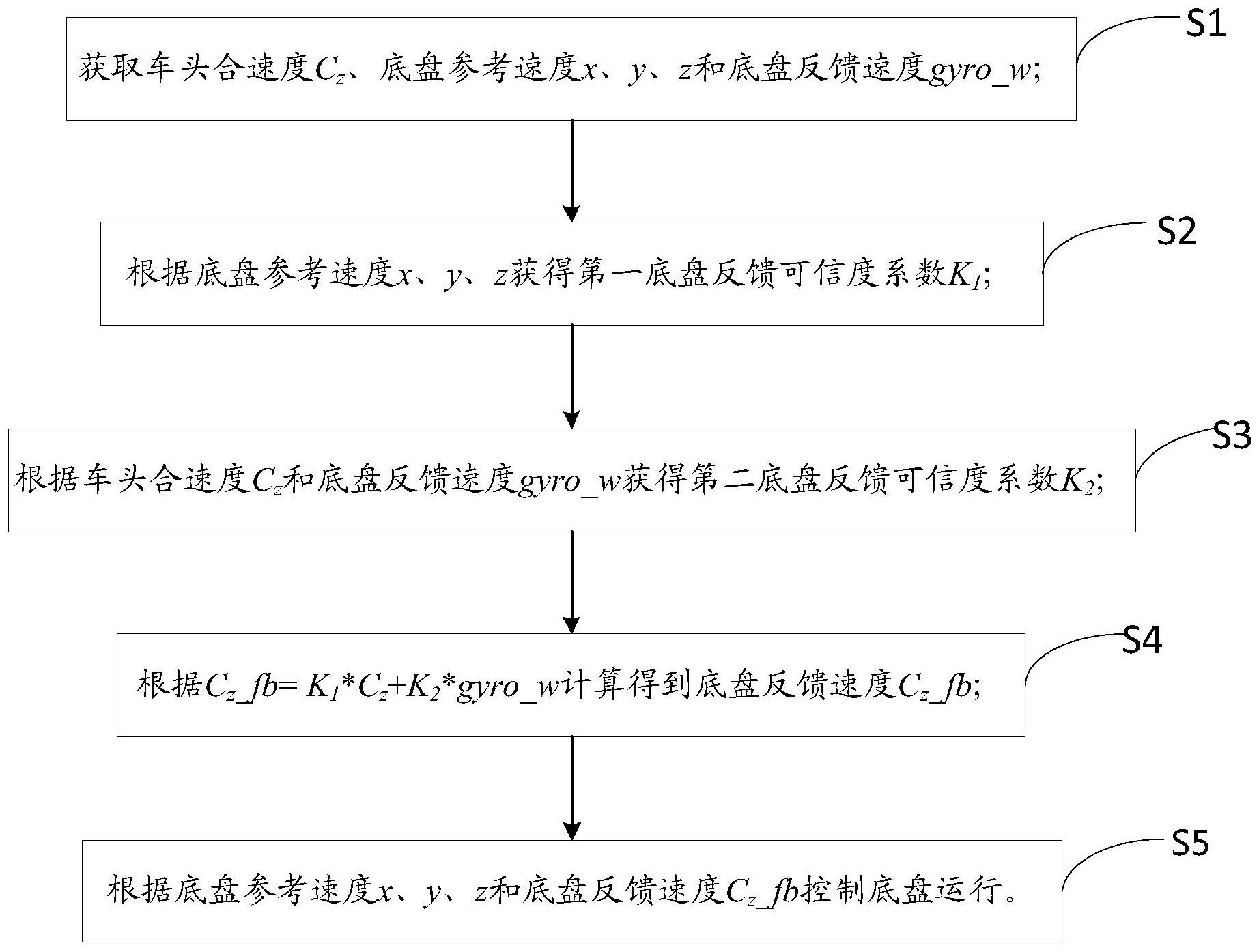
本发明公开了一种AGV小车、底盘运行控制方法、底盘运行控制系统和底盘运行控制装置,底盘运行控制方法包括:获取车头合速度Cz、底盘参考速度x、y、z和底盘反馈速度gyro_w;根据底盘参考速度x、y、z获得第一底盘反馈可信度系数;根据车头合速度Cz和底盘反馈速度gyro_w获得第二底盘反馈可信度系数;再计算得到底盘反馈速度Cz_fb;根据底盘反馈速度Cz_fb和底盘参考速度x、y、z控制底盘运行。上述底盘运行控制方法实现起来无需通过额外的高精度传感器检测和反馈,也无需判断的过程,即可实现底盘运行的稳定控制,这样可以降低对底盘控制计算和存储性能的要求,从而可以在一定程度上降低生产成本。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有