

授权公布号:CN218195170U
一种应用于商用机器人的升降运动结构
有效
申请
2022-04-15
申请公布
1970-01-01
授权
2023-01-03
预估到期
2032-04-15
| 申请号 | CN202220915017.X |
| 申请日 | 2022-04-15 |
| 授权公布号 | CN218195170U |
| 授权公告日 | 2023-01-03 |
| 分类号 | B25J9/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 浙江国自机器人技术股份有限公司 |
| 申请人地址 | 浙江省杭州市滨江区东信大道66号4幢5层501-516、518室 |
专利法律状态
2023-01-03
授权
状态信息
授权
摘要
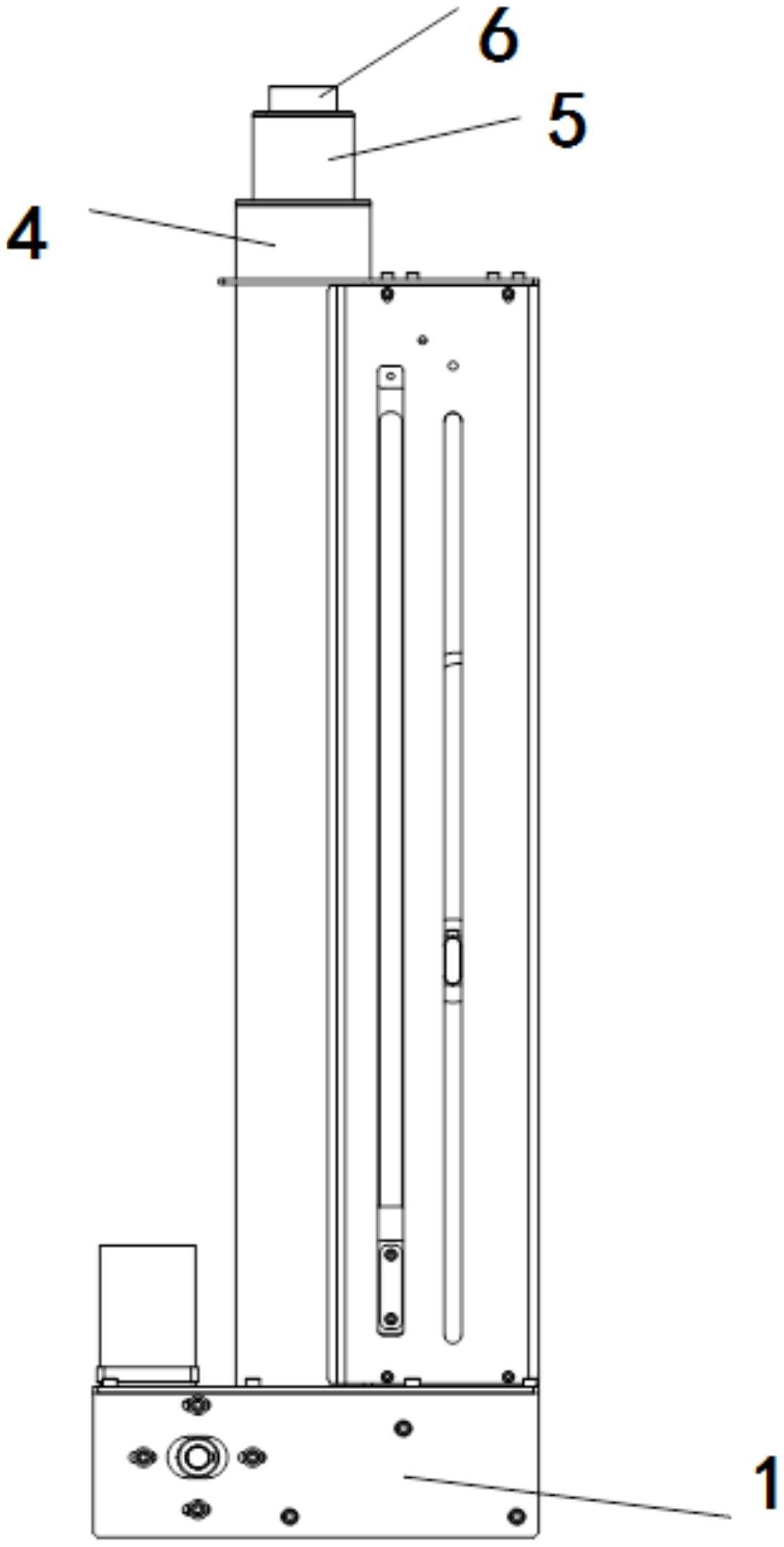
本实用新型公开了一种应用于商用机器人的升降运动结构,属于机械人活动控制领域,包括底座,所述底座上设有套筒组件,所述套筒组件包括若干个同轴心安装的套筒,相邻套筒之间安装有套环,所述套环的侧面周向设有若干个限位卡槽,所述限位卡槽中安装有弹性卡片,通过在不同套环的限位卡槽中安装不同长度的弹性卡片,可以使不同的套筒在移动过程中受到的挤压力不同,不会出现多个套筒由于摩擦力同时移动的情况,从而提高了升降控制的准确性,解决了现有技术中,机器人升降杆在伸缩的过程中,由于多节套筒之间互相摩擦,容易导致运行精度较低的问题。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有