

授权公布号:CN215968826U
一种基于视觉的机器人偏移抓取机构
有效
申请
2021-08-23
申请公布
1970-01-01
授权
2022-03-08
预估到期
2031-08-23
| 申请号 | CN202121980181.0 |
| 申请日 | 2021-08-23 |
| 授权公布号 | CN215968826U |
| 授权公告日 | 2022-03-08 |
| 分类号 | B25J15/08;B25J15/02 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 旗瀚科技有限公司 |
| 申请人地址 | 广东省深圳市福田区华富街道莲花一村社区皇岗路5001号深业上城(南区)T2栋2801 |
专利法律状态
2022-03-08
授权
状态信息
授权
摘要
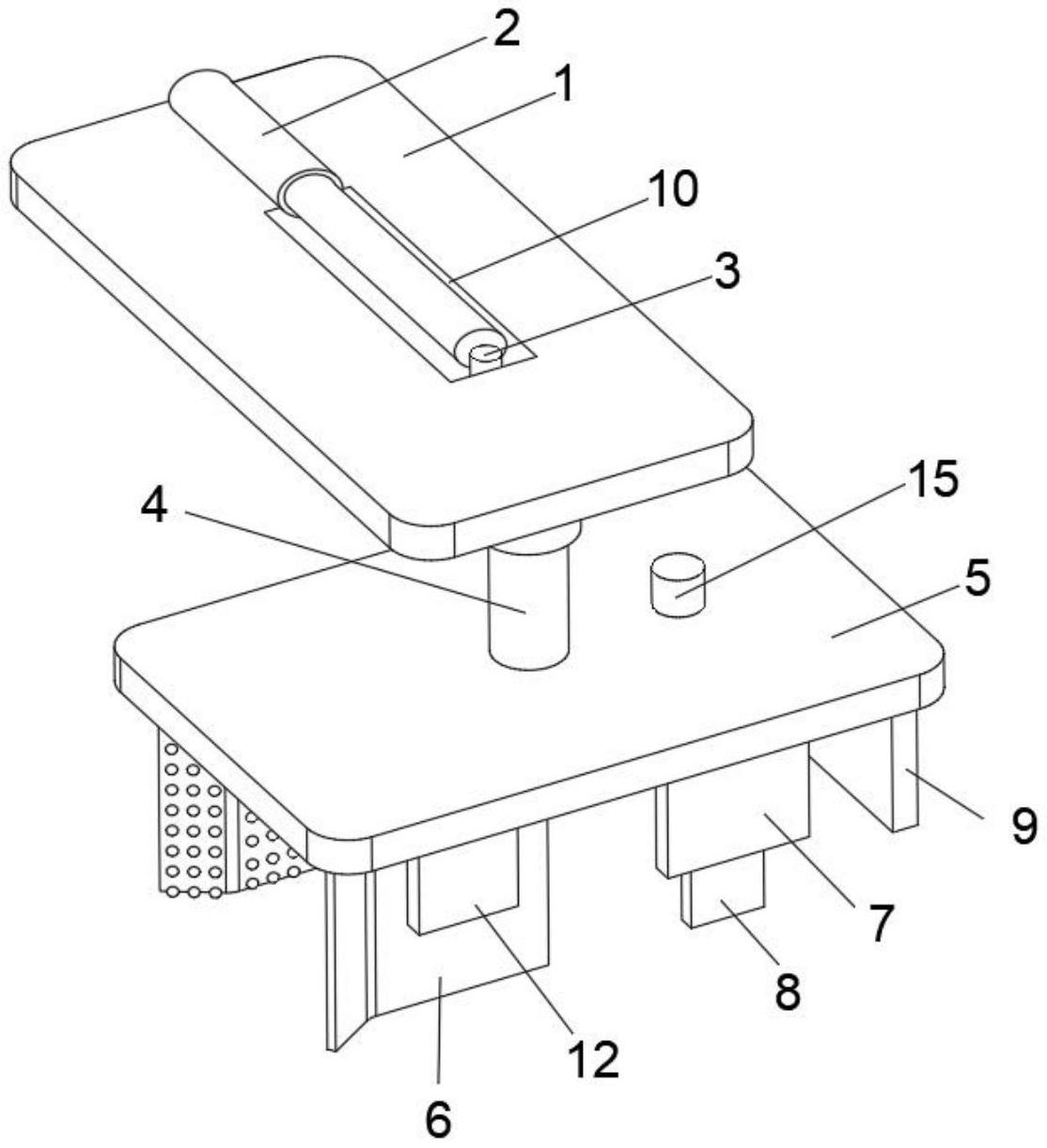
本实用新型公开了一种基于视觉的机器人偏移抓取机构,包括安装顶板,所述安装顶板顶部通过第一电动推杆连接有移动杆,所述移动杆底部贯穿安装顶板并固定连接有第二电动推杆,所述第二电动推杆活塞端固定连接有安装底板,所述安装底板底部设有两个呈八字型排列的限位板和用于调节限位板移动的调节机构;所述安装底板底部固定连接有两个对称设置的安装侧板。本实用新型,通过安装顶板、安装底板、限位板、第一双向螺杆、夹板和驱动机构之间的相互配合,利用第一双向螺杆的转动可调整两个限位板的间距,利用驱动机构可调整两个夹板的间距,可对不同大小、不同位置物品的位置进行夹取调整,设计灵活,实用性强。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有