

授权公布号:CN114608569B
三维位姿估计方法、系统、计算机设备及存储介质
有效
申请
2022-02-22
申请公布
2022-06-10
授权
2024-03-01
预估到期
2042-02-22
| 申请号 | CN202210161409.6 |
| 申请日 | 2022-02-22 |
| 申请公布号 | CN114608569A |
| 申请公布日 | 2022-06-10 |
| 授权公布号 | CN114608569B |
| 授权公告日 | 2024-03-01 |
| 分类号 | G01C21/16;G01S17/86;G01S19/48;G01S19/49;G01C5/06;G06F18/25 |
| 分类 | 测量;测试; |
| 申请人名称 | 杭州国辰机器人科技有限公司 |
| 申请人地址 | 浙江省杭州市萧山经济技术开发区建设二路957号 |
专利法律状态
2024-03-01
授权
状态信息
授权
2022-06-28
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/16;申请日:20220222
2022-06-10
公布
状态信息
公布
摘要
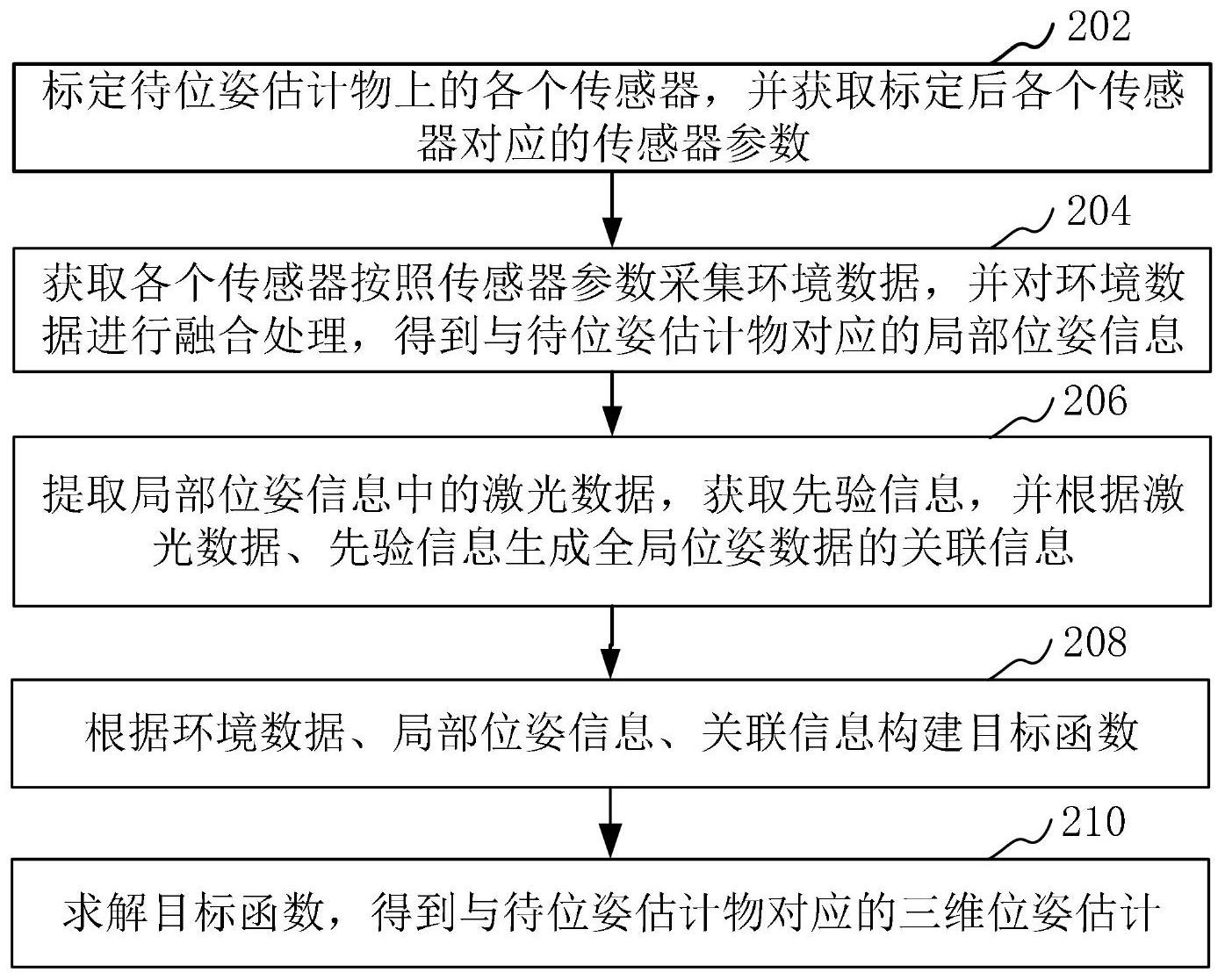
本方案涉及一种三维位姿估计方法、系统、计算机设备及存储介质。所述方法包括:标定待位姿估计物上的各个传感器,并获取标定后各个传感器对应的传感器参数;获取各个传感器按照传感器参数采集环境数据,并对环境数据进行融合处理,得到与待位姿估计物对应的局部位姿信息;提取局部位姿信息中的激光数据,获取先验信息,并根据激光数据、先验信息生成全局位姿数据的关联信息;根据环境数据、局部位姿信息、关联信息构建目标函数;求解目标函数,得到与待位姿估计物对应的三维位姿估计。通过将各个传感器采集的数据进行融合,在部分传感器失效的情况下,依靠其他正常传感器依然能够提供准确的环境数据,可以提高位姿估计的准确性。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有