

授权公布号:CN113459154B
基于差分机构的仿人机械臂
有效
申请
2021-07-06
申请公布
2021-10-01
授权
2022-06-17
预估到期
2041-07-06
| 申请号 | CN202110761598.6 |
| 申请日 | 2021-07-06 |
| 申请公布号 | CN113459154A |
| 申请公布日 | 2021-10-01 |
| 授权公布号 | CN113459154B |
| 授权公告日 | 2022-06-17 |
| 分类号 | B25J17/02;B25J18/00 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 杭州国辰机器人科技有限公司 |
| 申请人地址 | 浙江省杭州市萧山经济技术开发区建设二路957号 |
专利法律状态
2022-06-17
授权
状态信息
授权
2021-10-01
公布
状态信息
公布
摘要
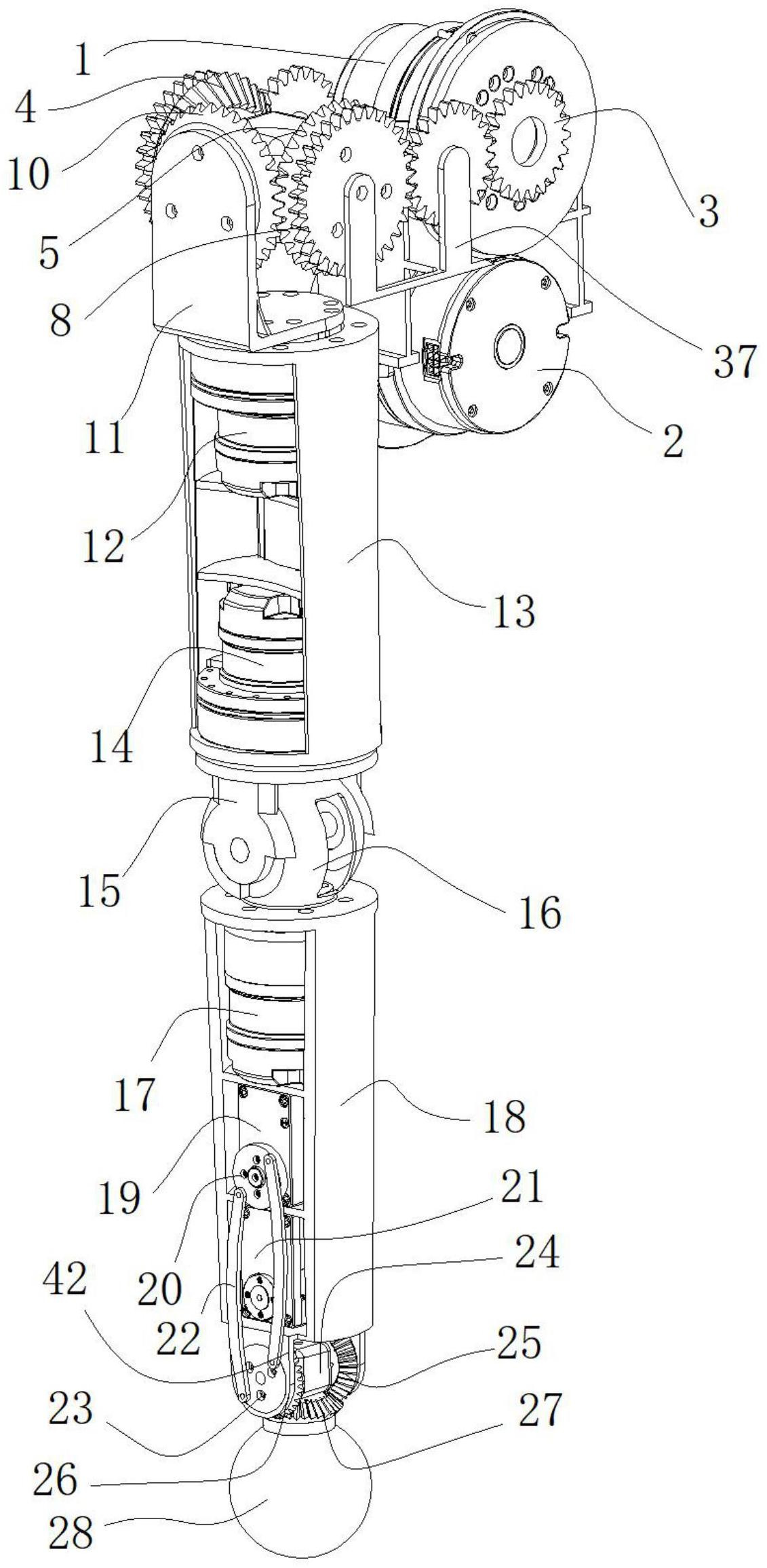
本发明公开了基于差分机构的仿人机械臂,涉及机械臂领域,本发明的技术方案包括第一差分机构、第一肩部电机、第二肩部电机、第三肩部电机、大臂件、肘关节组件、第一肘部电机、第二肘部电机、小臂件、第二差分机构、第一腕部电机和第二腕部电机;肘部锥齿轮机构保证了肘部两交叉自由度电机的串联布局,同时电机置于大臂和小臂内,保证了整个机械臂外观的完整性,在满足关节各自由度互相耦合的同时,使关节部分的体积控制得更小,整体制造和控制难度更低。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有