

授权公布号:CN113212591B
一种四足机器人
有效
申请
2021-05-12
申请公布
2021-08-06
授权
2022-06-17
预估到期
2041-05-12
| 申请号 | CN202110517292.6 |
| 申请日 | 2021-05-12 |
| 申请公布号 | CN113212591A |
| 申请公布日 | 2021-08-06 |
| 授权公布号 | CN113212591B |
| 授权公告日 | 2022-06-17 |
| 分类号 | B62D57/032 |
| 分类 | 无轨陆用车辆; |
| 申请人名称 | 徐州木牛流马机器人科技有限公司 |
| 申请人地址 | 江苏省徐州市铜山区大学路99号高新区大学创业园 |
专利法律状态
2022-06-17
授权
状态信息
授权
2021-08-06
公布
状态信息
公布
摘要
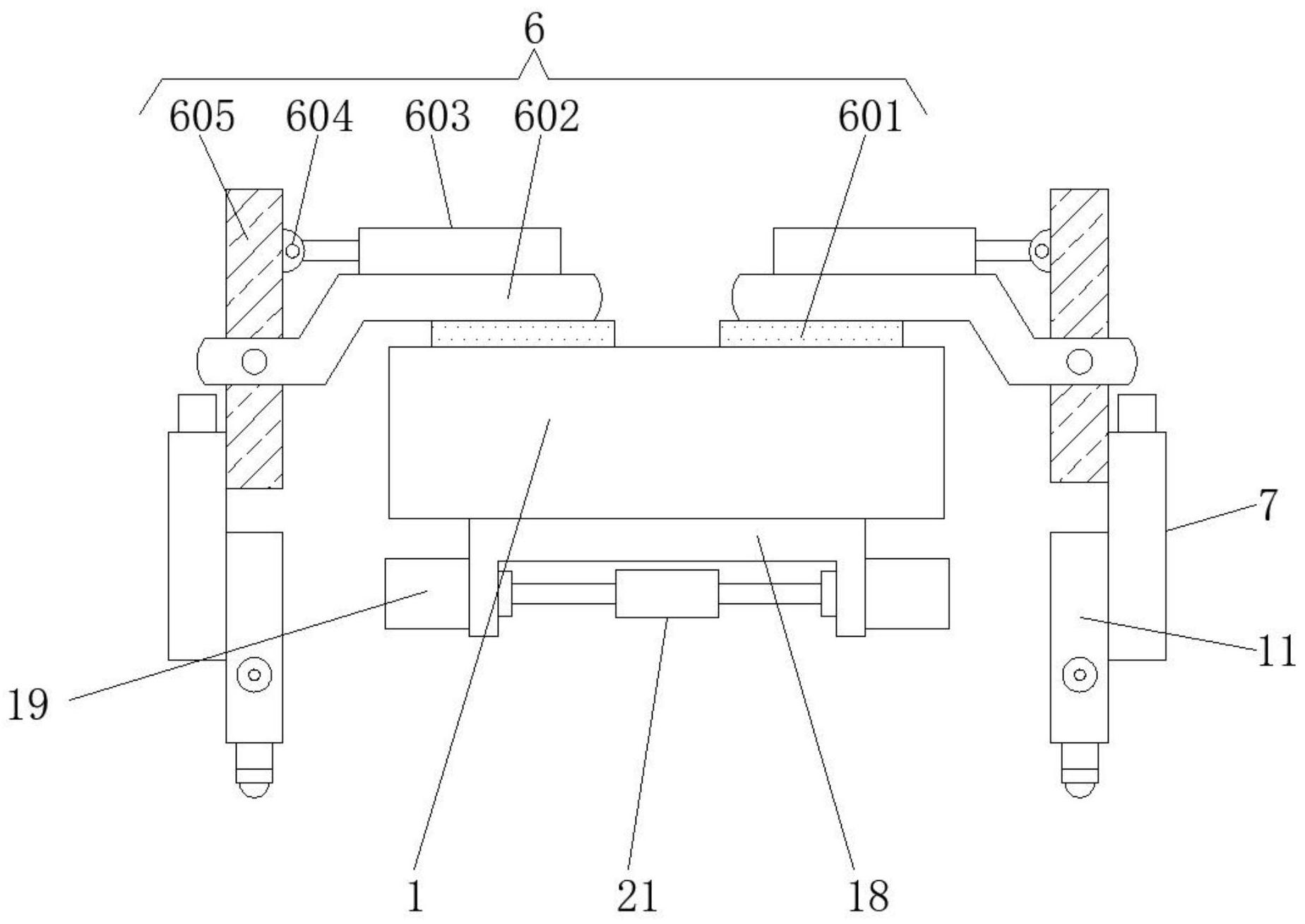
本发明公开了一种四足机器人,包括机架、驱动组件、连接架、限位组件和固定架,所述机架的内部四周转动连接有齿轮,所述转动盘转动连接在机架的顶部四周,所述连接架固定在驱动组件的底部,且连接架的顶部固定有第一马达,所述螺栓螺纹连接在支撑架的表面,所述固定架固定在机架的底部,且固定架的外侧两端固定有第二马达。该四足机器人设置有齿轮和安装架,通过安装架表面的第二气缸带动驱动杆在安装架的外侧转动,以便使驱动杆呈摆动状,从而实现四足行走的效果,配合机架内部第一气缸带动活动板滑动,使活动板配合其表面的齿条带动齿轮转动,从而通过齿轮带动转动盘以及安装架转动,以便调整行走方位,使得行走更加稳定。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有