

授权公布号:CN216376041U
一种基于抓取垃圾的机械夹固装置
有效
申请
2021-11-18
申请公布
1970-01-01
授权
2022-04-26
预估到期
2031-11-18
| 申请号 | CN202122822687.5 |
| 申请日 | 2021-11-18 |
| 授权公布号 | CN216376041U |
| 授权公告日 | 2022-04-26 |
| 分类号 | B65F9/00 |
| 分类 | 输送;包装;贮存;搬运薄的或细丝状材料; |
| 申请人名称 | 徐州木牛流马机器人科技有限公司 |
| 申请人地址 | 江苏省徐州市铜山区大学路99号高新区大学创业园 |
专利法律状态
2022-04-26
授权
状态信息
授权
摘要
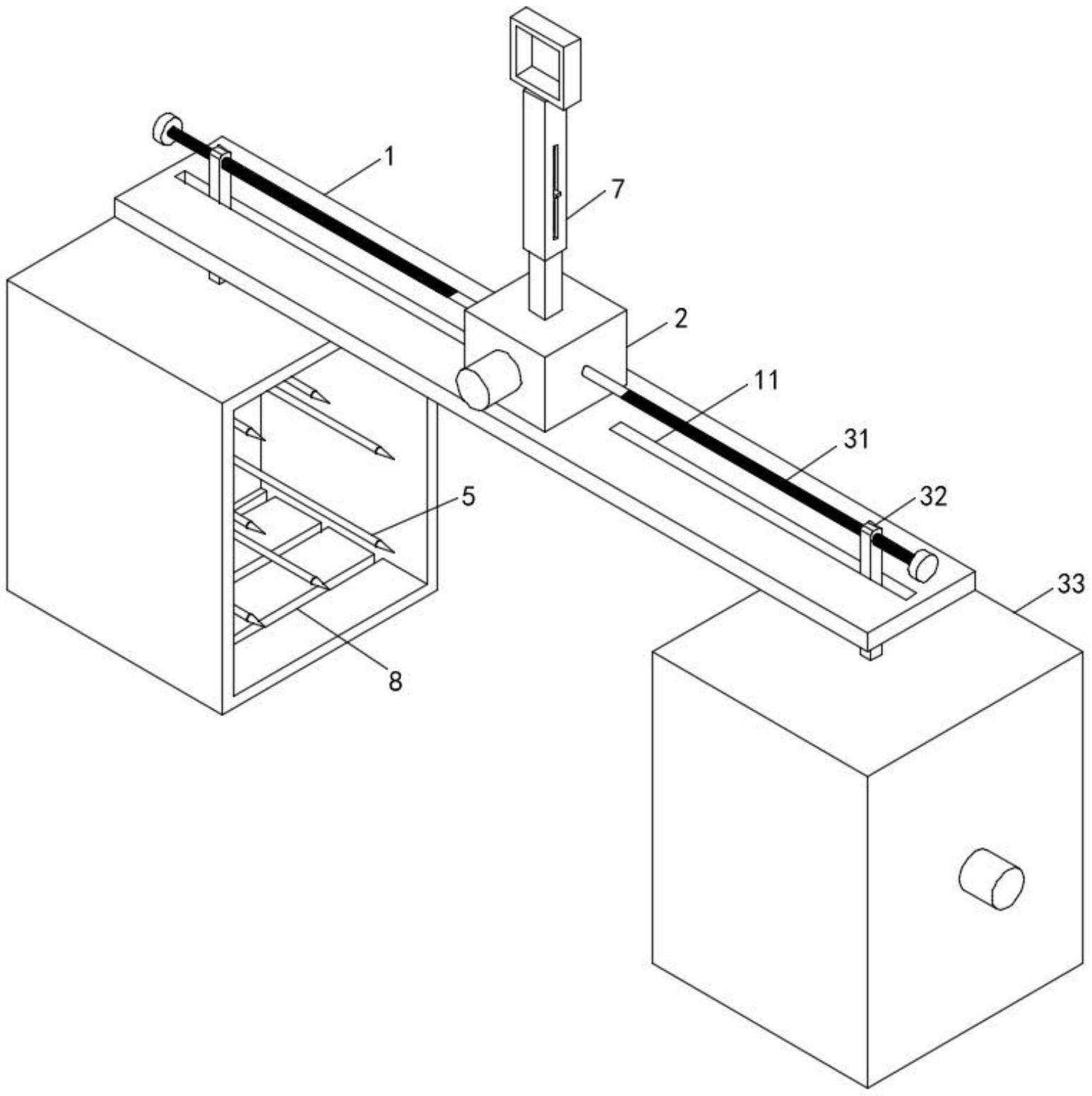
本实用新型涉及抓取装置领域,尤其涉及一种基于抓取垃圾的机械夹固装置。基于抓取垃圾的机械夹固装置包括支撑板、抓取机构、刺破组件、挤压机构和悬挂组件,支撑板的顶部固定安装有盒体,用于垃圾抓起的抓取机构安装在盒体与支撑板上,用于将垃圾袋刺穿的刺破组件安装在抓取机构的内部,用于挤出垃圾袋中废液的挤压机构安装在抓取机构的内部,悬挂组件安装在盒体的顶部。本实用新型提供的基于抓取垃圾的机械夹固装置具有在对垃圾进行抓取时,可以对垃圾袋中含有的废液进行清除,避免废液洒落在设备上造成污染的优点。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有