

授权公布号:CN216991980U
机器人头部二自由度运动关节
有效
申请
2021-11-15
申请公布
1970-01-01
授权
2022-07-19
预估到期
2031-11-15
| 申请号 | CN202122790796.3 |
| 申请日 | 2021-11-15 |
| 授权公布号 | CN216991980U |
| 授权公告日 | 2022-07-19 |
| 分类号 | B25J17/00;B25J9/12;B25J13/08 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 苏州穿山甲机器人股份有限公司 |
| 申请人地址 | 江苏省苏州市工业园区金鸡湖大道1355号国际科技园内123单元 |
专利法律状态
2022-07-19
授权
状态信息
授权
摘要
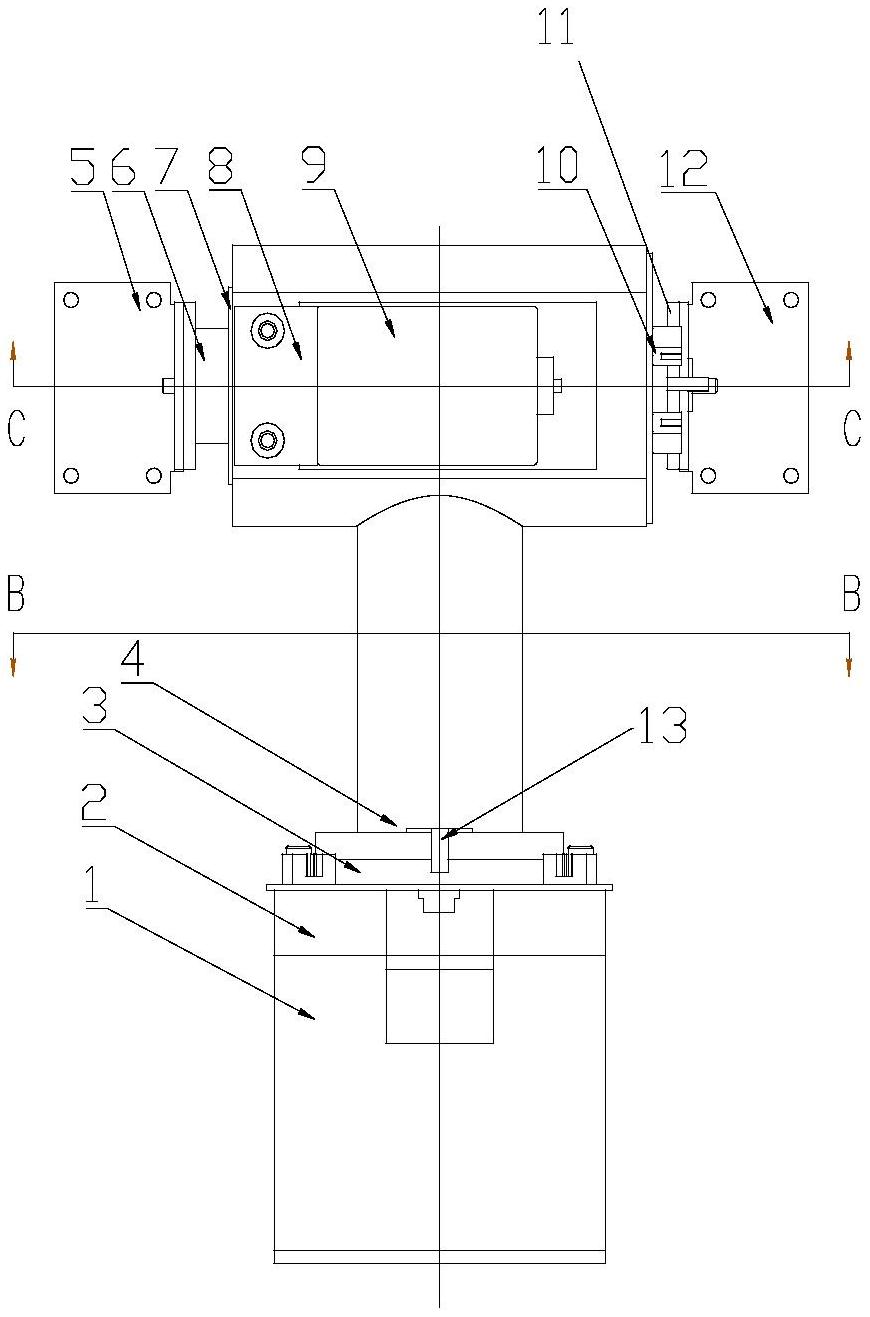
本实用新型公开了一种机器人头部二自由度运动关节,当点头电机转动时带动头部固定支架左转动,通过机器人头部外壳传递带动所述点头检测指针转动。当红外对射传感器检测到所述点头检测指针时,点头电机停止转动。当点头红外对射传感器检测失效时,点头限位销与所述头部固定支架左上的限位孔、头部固定支架右上的限位孔接触,电机停止工作;当转头电机转动时,带动转头检测指针转动。当转头红外对射传感器检测到所述转头检测指针时,所述转头电机停止转动。当所述转头红外对射传感器检测失效时,支柱转动过度时,会与所述转头限位销接触,转头限位销挡住支柱进一步转动,电机停止工作。从中可看出,本例结构简单、横向尺寸小,机械可靠性高。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有