

授权公布号:CN114770506B
带电作业八自由度机械臂运动控制方法
有效
申请
2022-04-29
申请公布
2022-07-22
授权
2024-01-23
预估到期
2042-04-29
| 申请号 | CN202210475611.6 |
| 申请日 | 2022-04-29 |
| 申请公布号 | CN114770506A |
| 申请公布日 | 2022-07-22 |
| 授权公布号 | CN114770506B |
| 授权公告日 | 2024-01-23 |
| 分类号 | B25J9/16 |
| 分类 | 手动工具;轻便机动工具;手动器械的手柄;车间设备;机械手; |
| 申请人名称 | 亿嘉和科技股份有限公司 |
| 申请人地址 | 江苏省南京市雨花台区安德门大街57号5幢1楼至3楼、8楼至12楼 |
专利法律状态
2024-01-23
授权
状态信息
授权
2022-08-09
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):B25J9/16;申请日:20220429
2022-07-22
公布
状态信息
公布
摘要
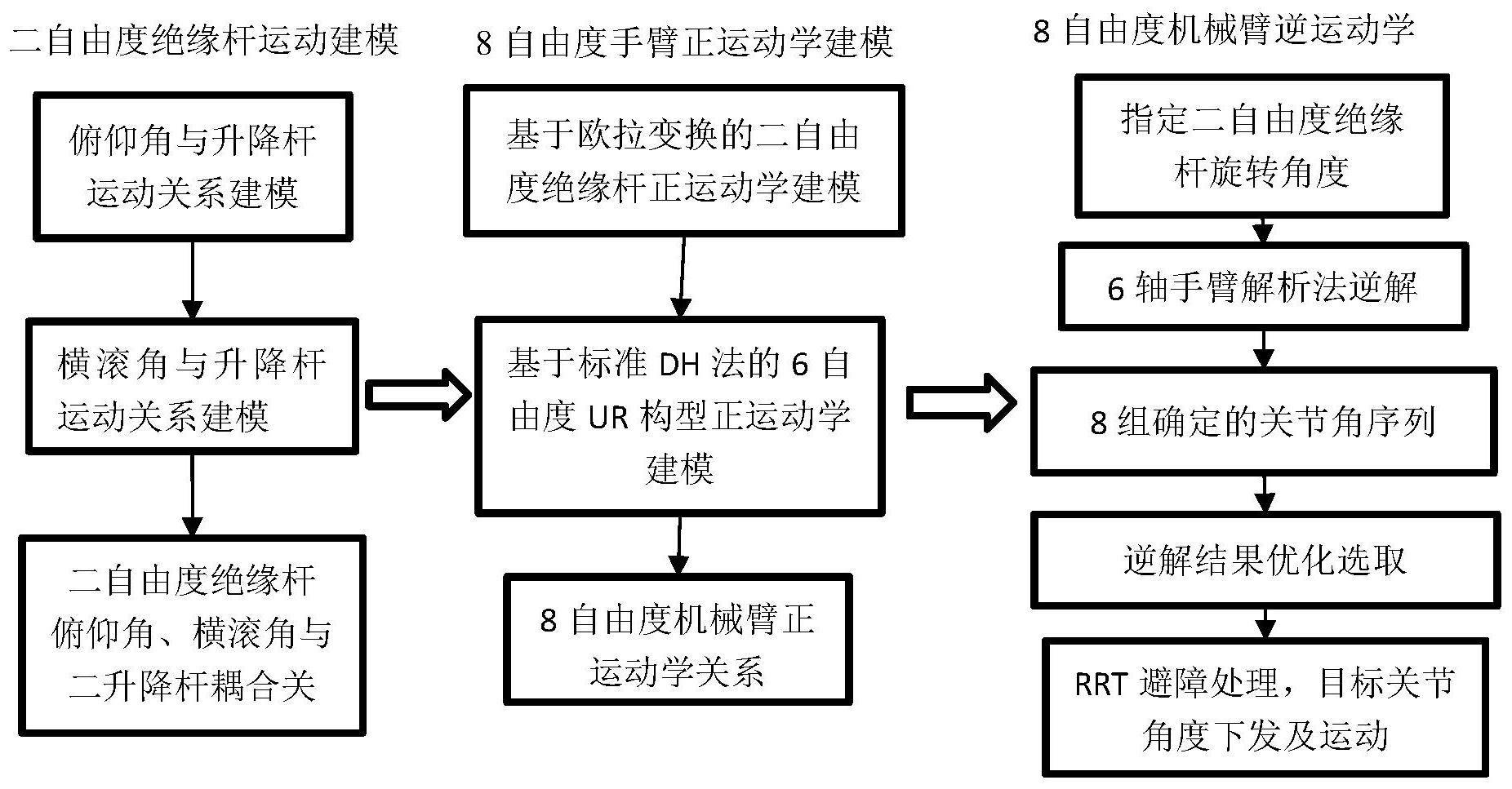
本发明提供了一种带电作业八自由度机械臂运动控制方法,主要解决8自由度机械臂在带电作业情况下的6自由度手臂运动学解算及二自由度绝缘杆控制问题,通过对8自由度手臂进行拆分,将2自由度绝缘杆与6自由度手臂分开控制,可避免多自由度机械采用数值解的不稳定性及求解效率低下问题,提升了机械臂控制精度与求解速率。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有