

授权公布号:CN112379666B
一种基于卫星组合导航信息的斗臂车调斗作业引导方法
有效
申请
2020-09-28
申请公布
2021-02-19
授权
2023-06-23
预估到期
2040-09-28
| 申请号 | CN202011042320.5 |
| 申请日 | 2020-09-28 |
| 申请公布号 | CN112379666A |
| 申请公布日 | 2021-02-19 |
| 授权公布号 | CN112379666B |
| 授权公告日 | 2023-06-23 |
| 分类号 | G05D1/02;G01S19/48;G01C21/20 |
| 分类 | 控制;调节; |
| 申请人名称 | 亿嘉和科技股份有限公司 |
| 申请人地址 | 江苏省南京市雨花台区安德门大街57号5幢1楼至3楼、8楼至12楼 |
专利法律状态
2023-06-23
授权
状态信息
授权
2021-03-09
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G05D1/02;申请日:20200928
2021-02-19
公布
状态信息
公布
摘要
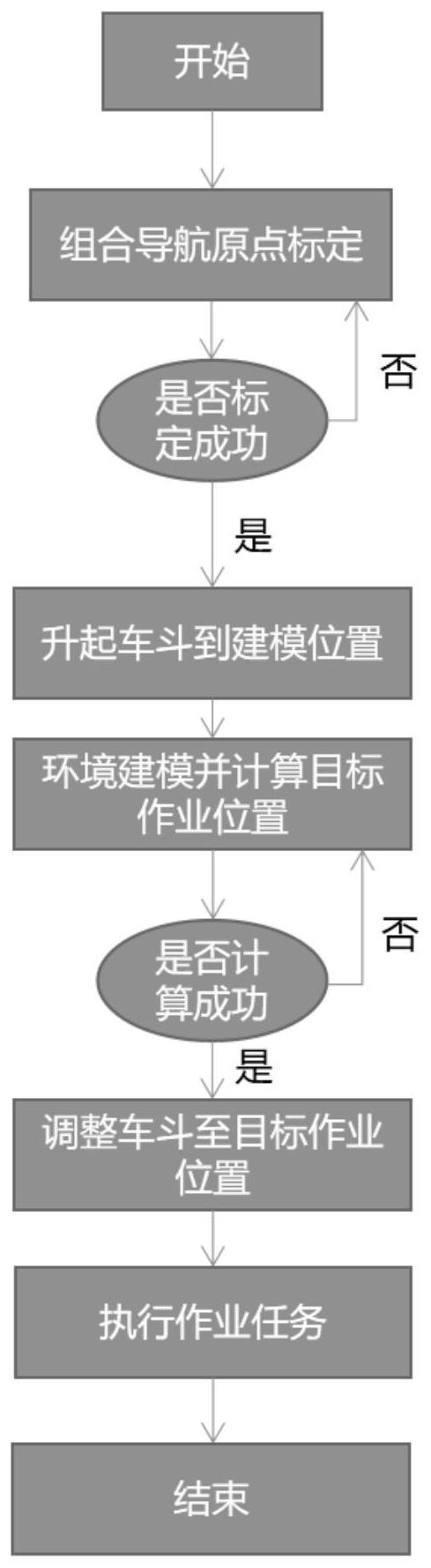
本发明公开了一种基于卫星组合导航信息的斗臂车调斗作业引导方法,包括步骤:(1)在机器人上安装组合导航设备,分别记录下在初始位置和目标作业位置的的经纬度坐标信息;(2)转换到斗臂车坐标系下得到初始位置和目标作业位置机器人在斗臂车坐标系下的坐标;(3)机器人建模并计算得到各目标电缆的最佳作业位置在斗臂车坐标系下的坐标;(4)建立以斗臂车大臂旋转中心为原点的球坐标系,分别得到初始位置和各目标电缆的最佳作业位置在球坐标系中的半径、仰角、方位角和切向角;(5)将二者的半径、仰角、方位角和切向角进行对比,指导斗臂车的移斗操作。本发明能够有效指导移斗操作,将平均移斗时间缩短到1分钟,精度达到6~8cm。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有