

授权公布号:CN106060380B
一种联动相机控制系统及控制方法
有效
申请
2016-05-11
申请公布
2016-10-26
授权
2019-05-10
预估到期
2036-05-11
| 申请号 | CN201610308380.4 |
| 申请日 | 2016-05-11 |
| 申请公布号 | CN106060380A |
| 申请公布日 | 2016-10-26 |
| 授权公布号 | CN106060380B |
| 授权公告日 | 2019-05-10 |
| 分类号 | H04N5/232;G05D3/12 |
| 分类 | 电通信技术; |
| 申请人名称 | 北京格灵深瞳信息技术股份有限公司 |
| 申请人地址 | 北京市海淀区永泰庄北路1号天地邻枫产业园1号楼B座 |
专利法律状态
2021-03-19
专利权人的姓名或者名称、地址的变更
状态信息
专利权人的姓名或者名称、地址的变更;IPC(主分类):H04N5/232;专利号:ZL2016103083804;变更事项:专利权人;变更前:北京格灵深瞳信息技术有限公司;变更后:北京格灵深瞳信息技术股份有限公司;变更事项:地址;变更前:100192 北京市海淀区永泰庄北路1号天地邻枫产业园1号楼B座;变更后:100192 北京市海淀区永泰庄北路1号天地邻枫产业园1号楼B座
2019-05-10
发明专利权授予
状态信息
授权
2019-01-11
著录事项变更
状态信息
著录事项变更;IPC(主分类):H04N5/232;专利申请号:2016103083804;变更事项:申请人;变更前:北京格灵深瞳信息技术有限公司;变更后:北京格灵深瞳信息技术有限公司;变更事项:地址;变更前:100091 北京市海淀区玉带路6号;变更后:100192 北京市海淀区永泰庄北路1号天地邻枫产业园1号楼B座
2016-11-23
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):H04N5/232;申请日:20160511
2016-10-26
发明专利申请公布
状态信息
公布
摘要
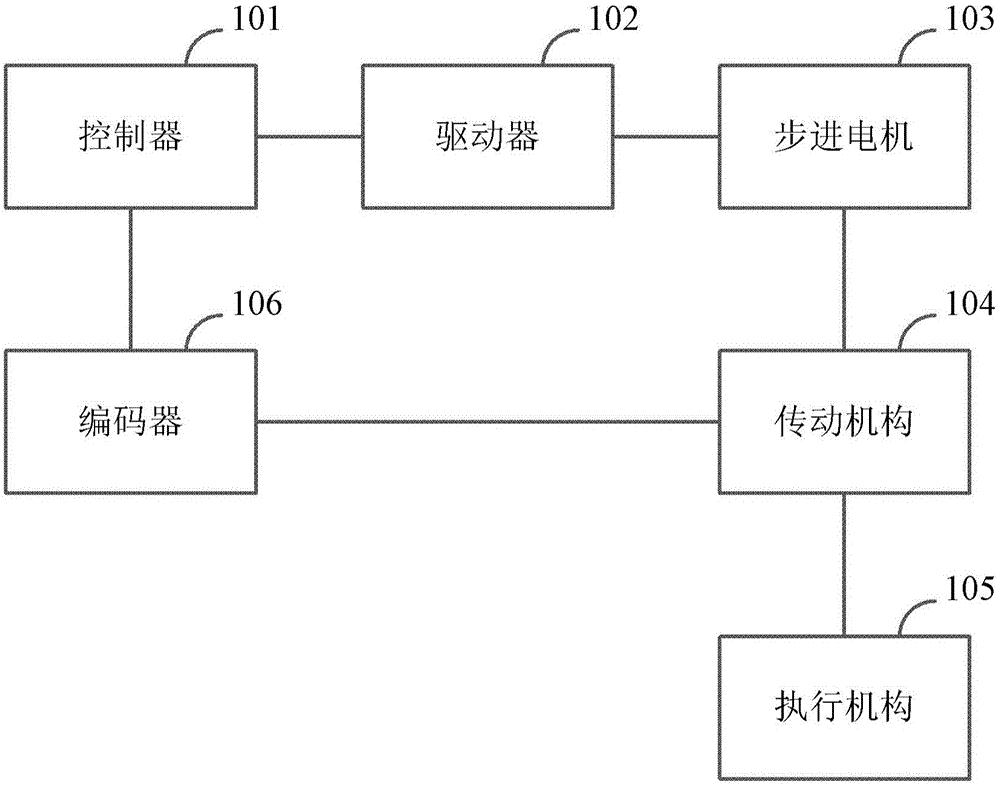
本申请提供了一种联动相机控制系统及控制方法,系统包括控制器、驱动器、步进电机、传动机构、执行机构和编码器,控制器用于以脉冲频率f(n)向驱动器发送脉冲宽度调制PWM脉冲,所述n表示步进电机细分微步第n步;驱动器用于在接收到PWM脉冲之后控制步进电机转动;传动机构用于将驱动力矩提高至预设值;执行机构用于在步进电机的驱动力下转动;编码器用于记录执行机构转动的角度值;控制器进一步用于在判断角度值与期望值的差大于预设误差范围时,驱动步进电机以预设频率fs转动预设时间。本申请通过控制器发送脉冲信号至驱动器控制步进电机转动,可以做到完全静止,且由于增加了反馈装置构成闭环系统,可以避免丢步情况的发生,确保转动控制完全可靠。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有