

授权公布号:CN107179082B
基于拓扑地图和度量地图融合的自主探索方法和导航方法
有效
申请
2017-07-07
申请公布
2017-09-19
授权
2020-06-12
预估到期
2037-07-07
| 申请号 | CN201710551277.7 |
| 申请日 | 2017-07-07 |
| 申请公布号 | CN107179082A |
| 申请公布日 | 2017-09-19 |
| 授权公布号 | CN107179082B |
| 授权公告日 | 2020-06-12 |
| 分类号 | G01C21/20 |
| 分类 | 测量;测试; |
| 申请人名称 | 上海阅面网络科技有限公司 |
| 申请人地址 | 上海市静安区愚园东路28号东海广场3号楼1层 |
专利法律状态
2020-06-12
授权
状态信息
授权
2017-10-20
实质审查的生效
状态信息
实质审查的生效;IPC(主分类):G01C21/20;申请日:20170707
2017-09-19
公布
状态信息
公布
摘要
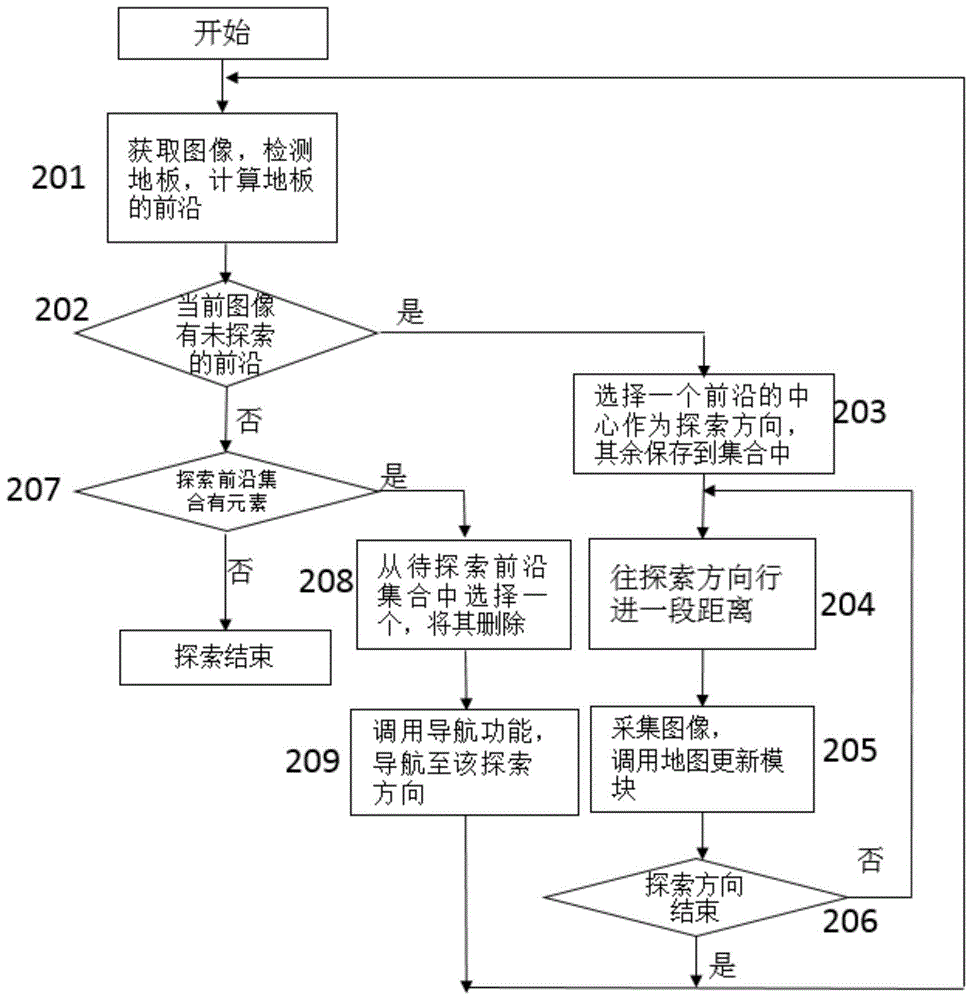
本发明公开了一种基于拓扑地图和度量地图融合的自主探索方法,应用于机器人对未知环境进行探索,该方法包括:A、采集当前图像,确定候选的探索方向;B、对每一个候选的探索方向进行探索,驱动所述机器人向所述候选的探索方向行进第一设定距离,并在行进的过程中更新拓扑地图和度量地图,直至当前图像的所有候选的探索方向均探索完毕;C、根据已创建的拓扑地图和度量地图,驱动所述机器人行进第二设定距离,并返回A,直至探索完当前未知环境。本发明还公开了一种基于拓扑地图和度量地图的导航方法。本发明可以应用于机器人在未知环境中的自主探索、地图创建和导航。
 chinappkf
客服微信号
chinappkf
客服微信号
 chinappsw
商务合作
chinappsw
商务合作
 品牌风云榜
关注公众号
品牌风云榜
关注公众号
CopyRight 2005-2026 品牌网 chinapp.com 版权所有